

Local Saturation Adaptive Controller, Control System and Control Method for Overhead Crane
An adaptive controller and bridge crane technology, applied in the direction of transportation and packaging, load suspension components, etc., can solve the problems that the bridge crane cannot be guaranteed to start smoothly, and it is difficult to measure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
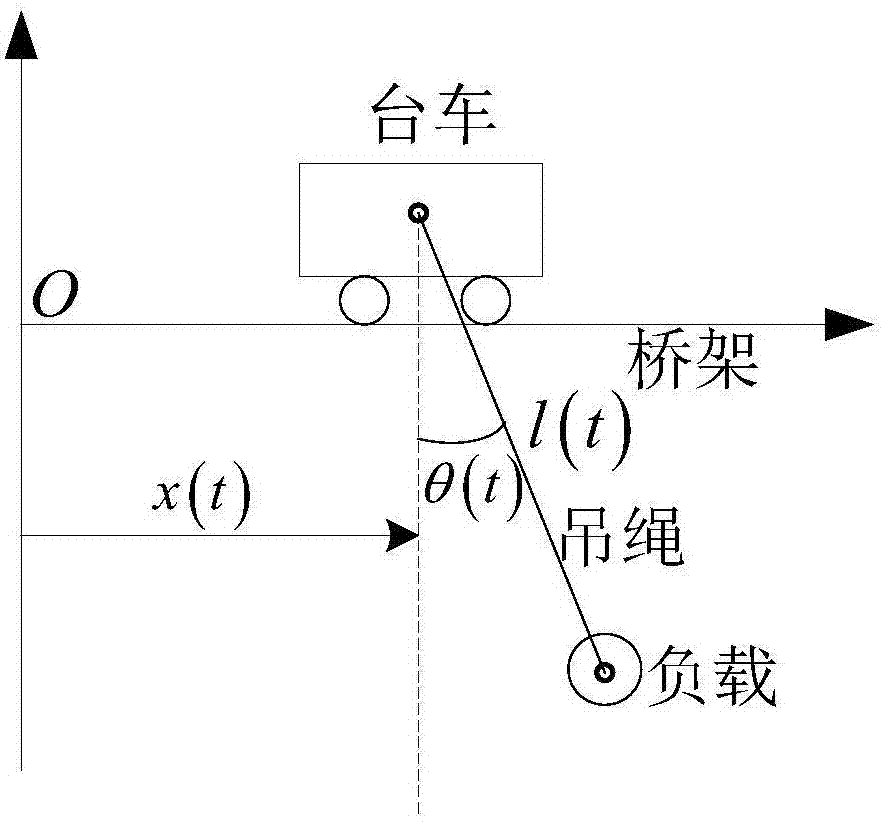
[0054] The schematic diagram of the bridge crane system accompanying the load lifting movement is as follows: figure 1 Therefore, its dynamic model is as follows:
[0055]
[0056]
[0057]
[0058] In the formula, M and m p represent the weight of the bridge crane and the load respectively, g is the acceleration of gravity, d x 、d l 、c θ Represents the air resistance coefficient, x(t) and l(t) are the displacement of the bridge crane and the length of the hanging rope respectively, θ(t) is the angle between the load and the vertical direction, F x with F l represent the driving forces in the x and l directions respectively, f rx is the friction force.
[0059] To facilitate the following analysis, formulas (1)-(3) are written in the following compact form:
[0060]
[0061] where the state vector q is:
[0062] q=[x(t),l(t),θ(t)] T , (5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More