

Completely passive both-foot walking machine with bionic ankle and subtalar joints
A leg joint and walking machine technology, applied in the field of robotics, can solve problems such as poor stability and unnatural gait, achieve the effect of optimizing walking energy efficiency, improving walking stability and naturalness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
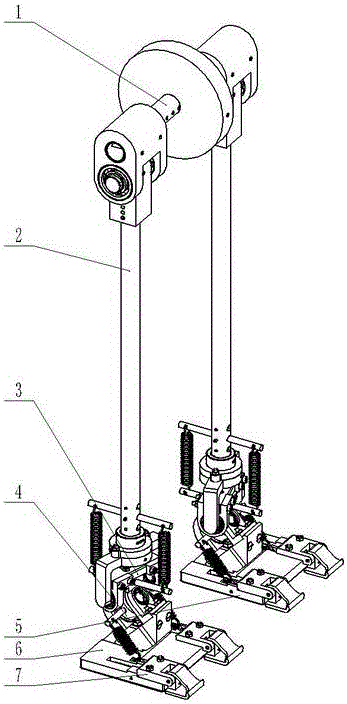
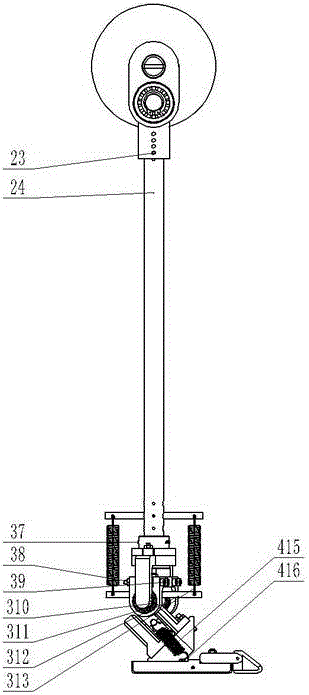
[0025] see figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, the present embodiment comprises hip assembly 1, leg assembly 2, distance-leg joint assembly 3, distance-heel joint assembly 4, left sole 5, right sole 6, toe assembly 7; The assembly 2 is arranged between the hip assembly 1 and the talus-leg joint assembly 3, and constitutes the main part of the walking machine; the talus-heel joint assembly 4 is arranged between the talus-leg joint assembly 3 and the sole of the foot, and the toes The assembly 7 is distributed on both sides of the sole of the foot; the sole of the foot includes the sole of the left foot 5 and the sole of the right foot 6 .
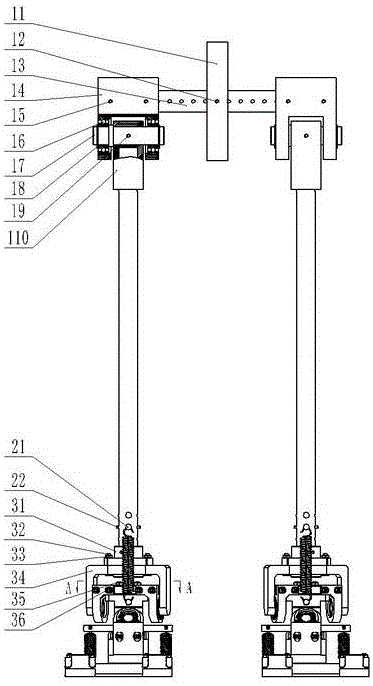
[0026] The hip assembly 1 includes a counterweight 11, a hip crossbeam 13, a first bearing seat 14, and a hip connector 110. The counterweight 11 is plugged into the hip crossbeam 13 through a counterweight fixing pin 12. The first The bearing housings 14 are symmetrically distributed, and are respectivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More