

Method for distributing foot end force of foot robot based on optimized support ratio
A technology of support ratio and foot end force, applied in the field of robot foot force distribution optimization, can solve problems such as low efficiency, complex calculation, and inability to obtain optimal solutions, and achieve the effect of ensuring the optimization results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
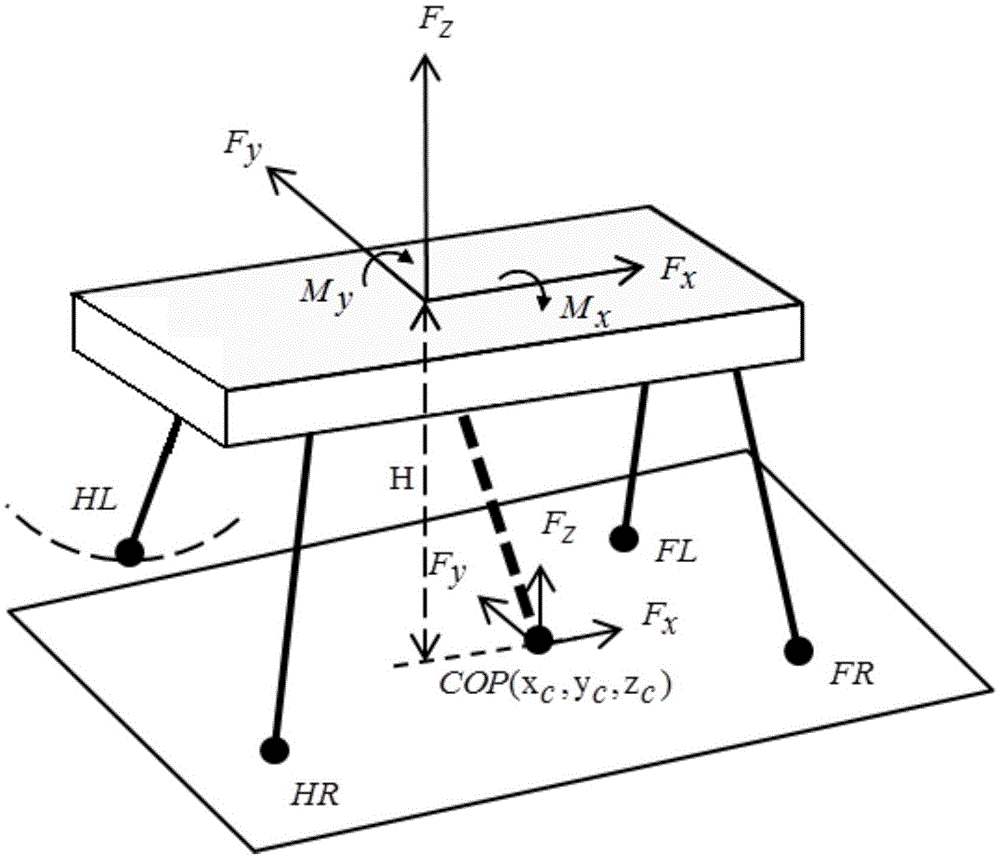
[0015] The present invention proposes a foot-end force distribution method based on an optimized support ratio, using a single-leg virtual leg model, and obtaining the expected zero moment point of the virtual leg according to the virtual servo force of the fuselage; according to the position of the foot end, a nonlinear optimization algorithm is used Obtain the minimum support ratio; optimize the force direction of the foot end according to the virtual servo force of the fuselage, the minimum support ratio, and the foot end position. Specifically include the following steps:
[0016] like figure 1 As shown, in step S1, taking the body coordinate system as the reference coordinate system, assuming that the left rear l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More