

Industrial vehicle capable of traveling in four directions and traveling mechanism of industrial vehicle
A technology of walking mechanism and industrial vehicles, which is applied to the steering mechanism of deflectable wheels, steering mechanism, vehicle parts, etc., which can solve the problems of unstable support of the running mechanism, inability to realize turning, and only straight-line driving, etc., to achieve a good body Steering travel, ease of implementation, effect of minor body modifications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
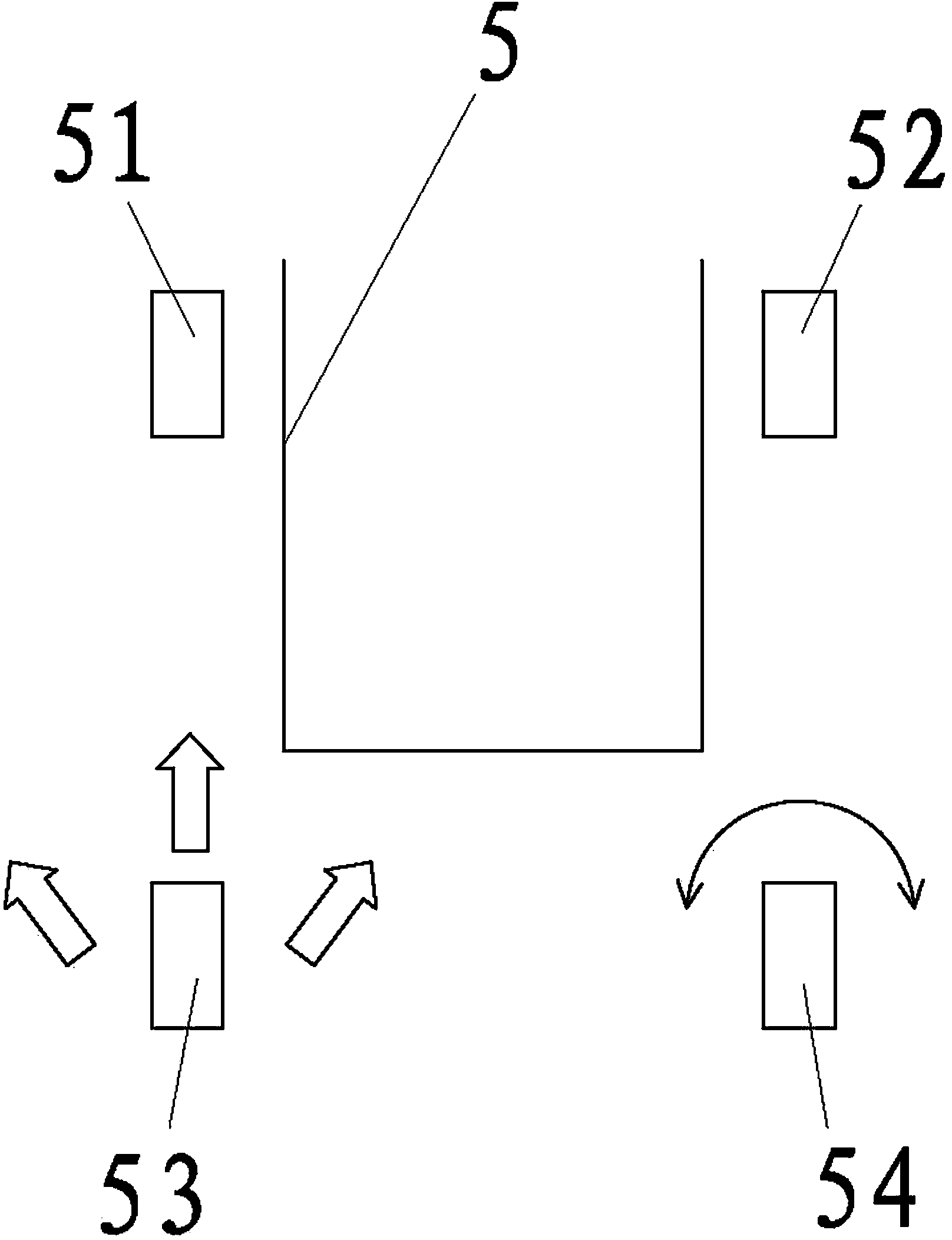
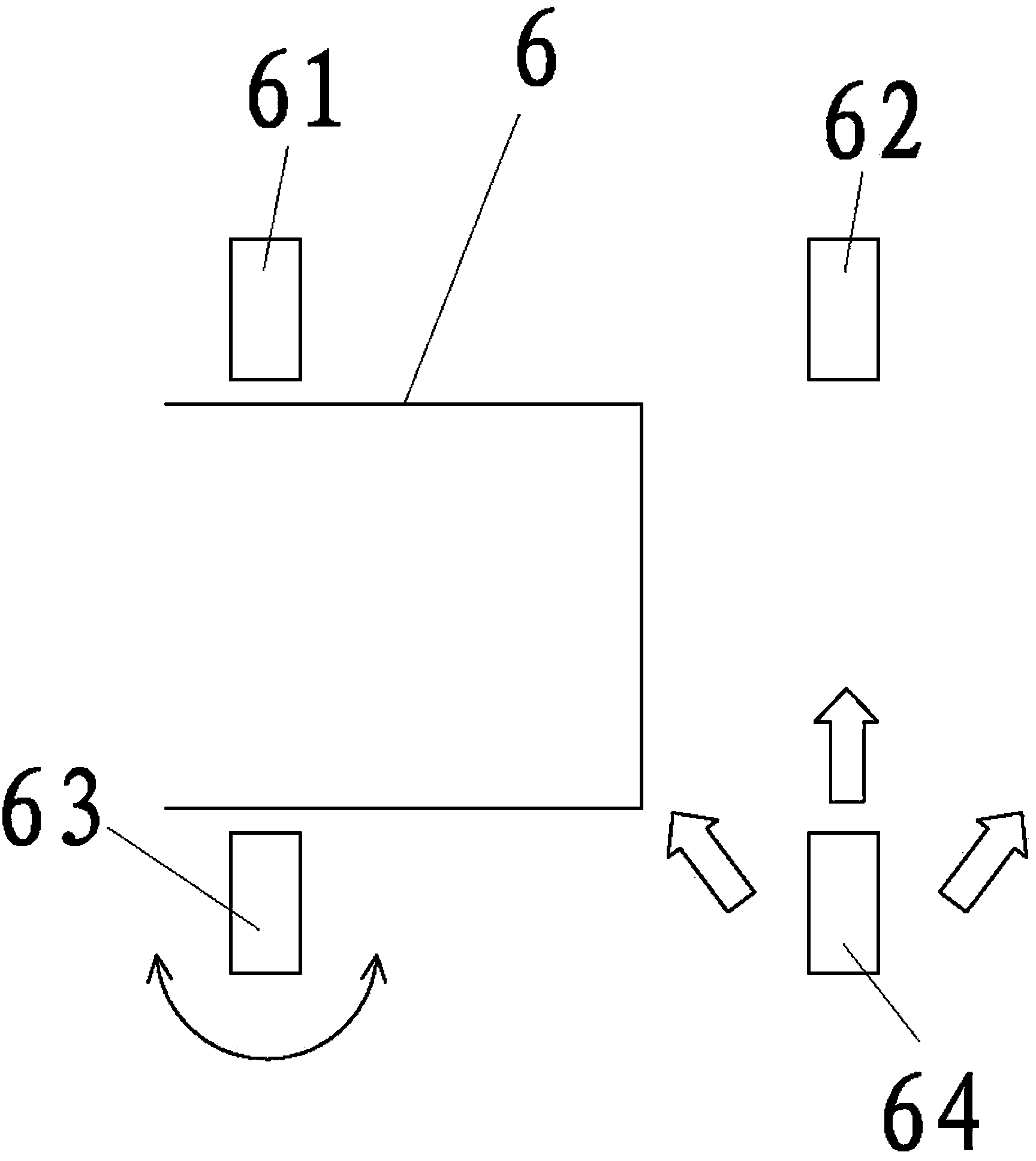
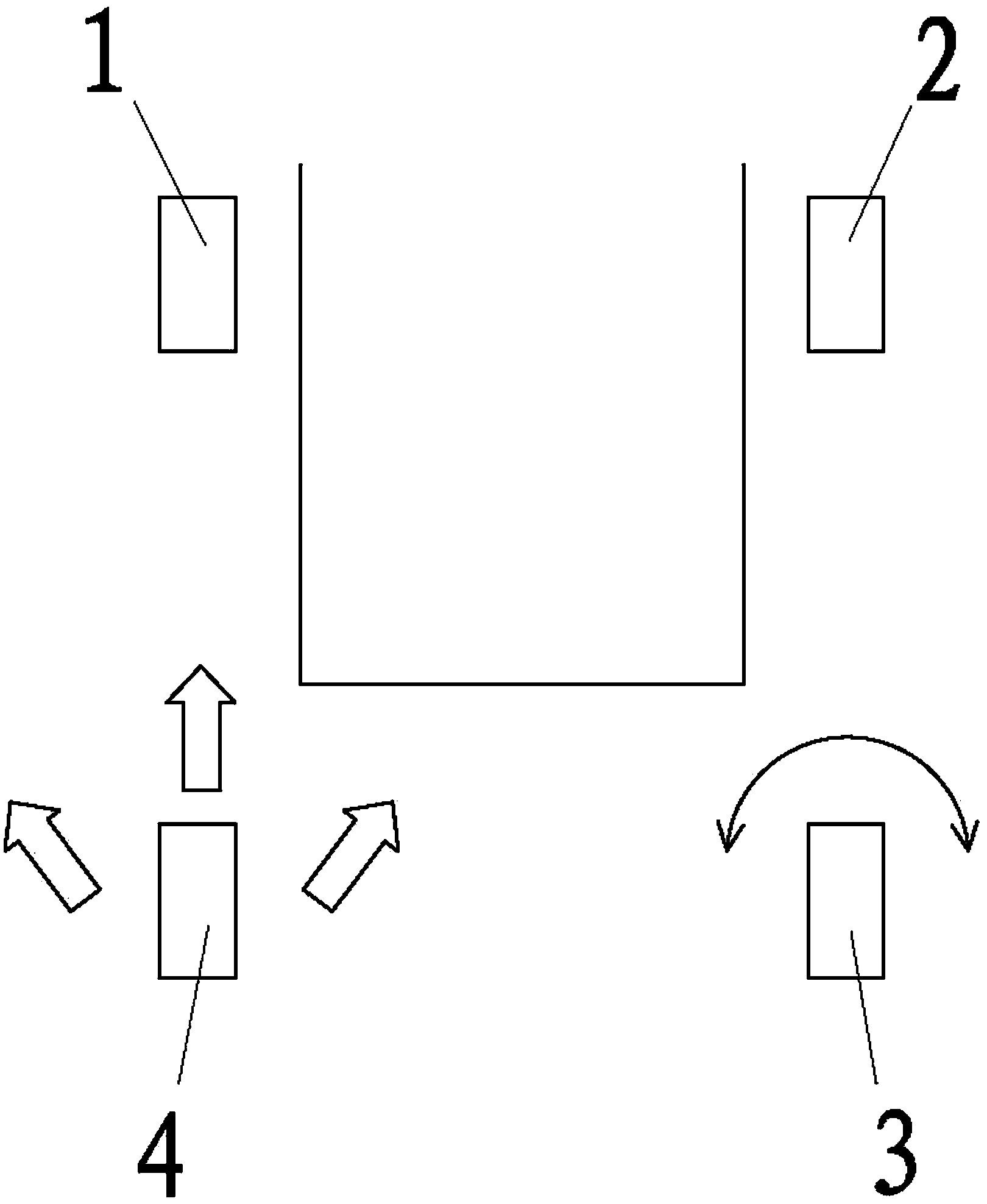
[0056] Embodiment 1: as image 3 As shown, a running mechanism of an industrial vehicle capable of traveling in four directions includes four wheel sets respectively arranged at four different positions of the vehicle body to form a quadrilateral, which is generally rectangular.
[0057] The four wheel sets are wheel set one 1, wheel set two 2, wheel set three 3, wheel set four 4, wheel set one 1 and wheel set three 3 are located at opposite corners of the quadrilateral respectively; wheel set two 2 and wheel set 4 and 4 are respectively located at the other opposite corners of the quadrilateral; the wheel set 4 is a steering wheel set whose steering angle is controlled by the steering mechanism, and is also a driving wheel set. The steering mechanism is generally an electric steering device, which can be steered with the manipulation of the operator. ; Wheel set 2 2 is always a directional wheel, and wheel set 2 2 can realize 90-degree steering to adapt to different driving m...
Embodiment 2
[0081] Embodiment 2: The difference from Embodiment 1 is that the quadrilateral formed by the four wheel sets is a trapezoid, for example, as Figure 14 As shown, the connecting line a between the first runner 13 and the second runner 24 is not perpendicular to the connecting line b between the second runner 24 and the third runner 33.
Embodiment 3
[0082] Embodiment 3: The difference from Embodiment 1 is that the quadrilateral formed by the four wheel sets is a trapezoid, for example, as Figure 15 As shown, the connection line a between runner one 13 and runner two 24 is not perpendicular to the connection line b between runner two 24 and runner three 33; at this time, the axis of runner three 33 is connected to line b Overlap; and at this time, the driving mode is in the horizontal driving mode, the runner three 33 is switched to the directional state, and the acute angle α formed by the axis of the runner three 33 and the length of the fork is 5 degrees, in this case, if the runner one 13 The axial direction when switching to the directional state is perpendicular to the length direction of the cargo fork, and the rotating shaft 22 of the runner 2 24 can rotate at a range of 95 degrees; When the included angle formed by the length direction is 85 degrees, the rotating shaft 22 of the second runner 24 can rotate at a r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More