

Gait planning method for improving crawling stability of dinosaur as biosimulation machine
A technology of gait planning and bionic machinery, applied in the direction of using feedback control, etc., to achieve the effect of improving walking stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
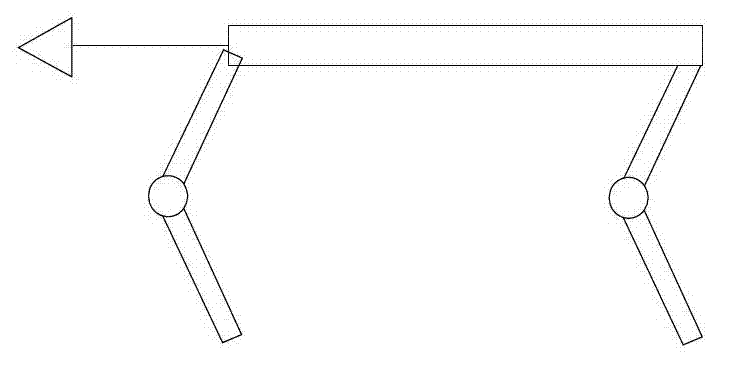
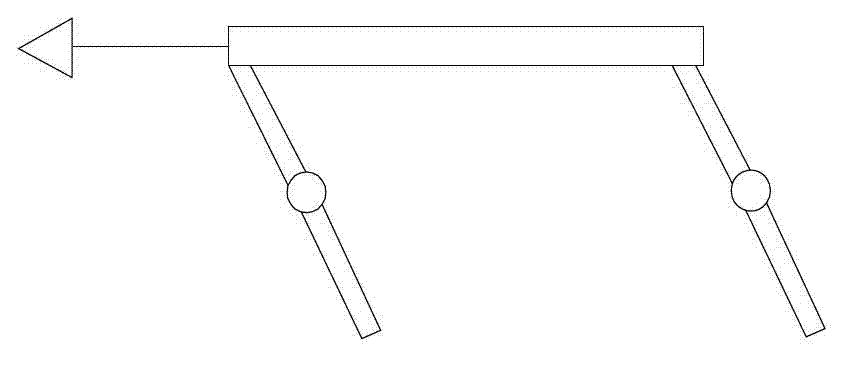
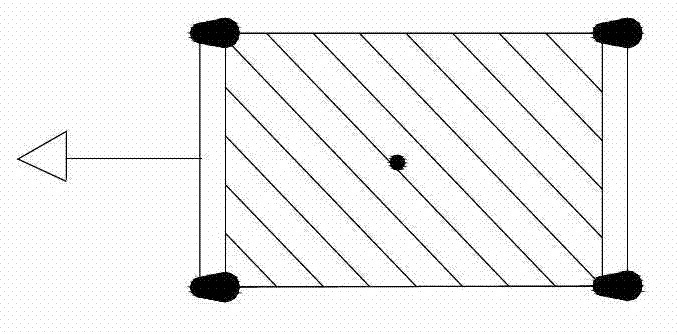
[0063] The gait planning method for improving the crawling stability of bionic mechanical dinosaurs provided by the present invention fully considers the large size, heavy mass and relatively discrete distribution of large quadruped bionic mechanical dinosaurs, and the relatively large mass of legs, head and tail. It provides a basis for improving the walking stability of large quadruped bionic mechanical dinosaurs. The present invention will be described in detail below in conjunction with the accompanying drawings and a specific embodiment.
[0064] In the specific embodiment described, the length of the large-scale quadruped bionic mechanical dinosaur is about 3.5 meters, the height is about 2 meters, the width is about 1.5 meters, the total weight is about 400 kg, and there are 17 degrees of freedom of joints. Mouth M, horizontal neck BZ, vertical neck BS, left front thigh QZD, left front calf QZX, left front hip QZK, left rear thigh HZD, left rear calf HZX, left rear hip ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More