Telegraph pole installation robot
A robot and utility pole technology, applied in the field of electric power grid, can solve the problem of occupying resources and other costs, and achieve the effects of saving manpower, reducing risks, and improving construction efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further described in detail below through embodiments and in conjunction with the accompanying drawings.
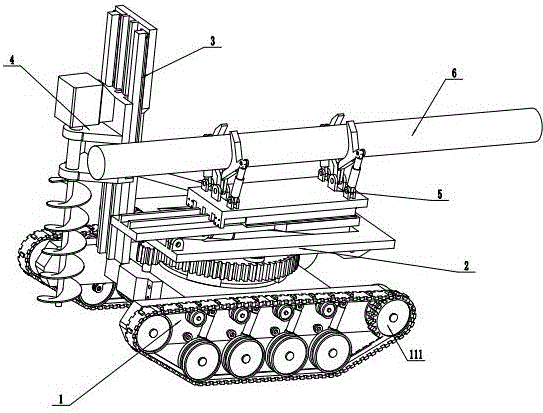
[0021] like figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 As shown, a utility pole installation robot includes a traveling mechanism 1, a turntable 2, two bottom plates 3, a punching module 4, and a pole module 5, and is characterized in that the turntable 2 is slidably installed on the top of the traveling mechanism 1 above the slide rail 110; the two base plates 3 are hinged on the platform 203; the punching module 4 is slidably installed on the linear guide rail 303 of one base plate 3; the pole module 5 is slidably installed on the other base plate 3 on the linear guide rail 303;
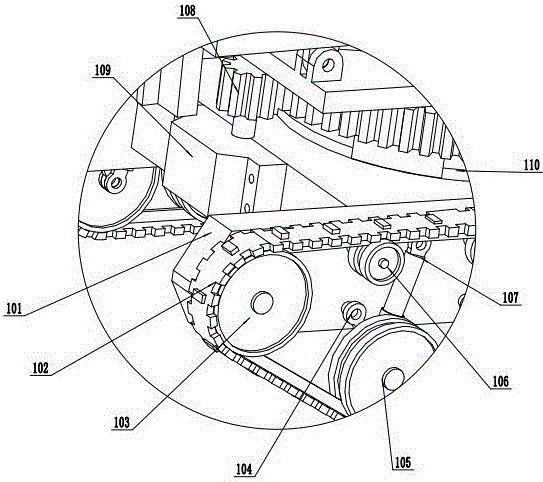
[0022] The walking mechanism 1 includes a base 101, 2 crawlers 102, 2 front guide wheels 103, 8 rocking arms 104, 8 road wheels 105, 8 guide wheels 106, 8 shock absorbers 107, pinions 108...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More