

Neural network-based visual system calibration method
A neural network and calibration method technology, applied in the field of vision system calibration, can solve problems such as low accuracy, slow iteration speed, and cumbersome calibration process, and achieve the effect of simplifying calibration steps, accelerating convergence speed, and improving generalization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
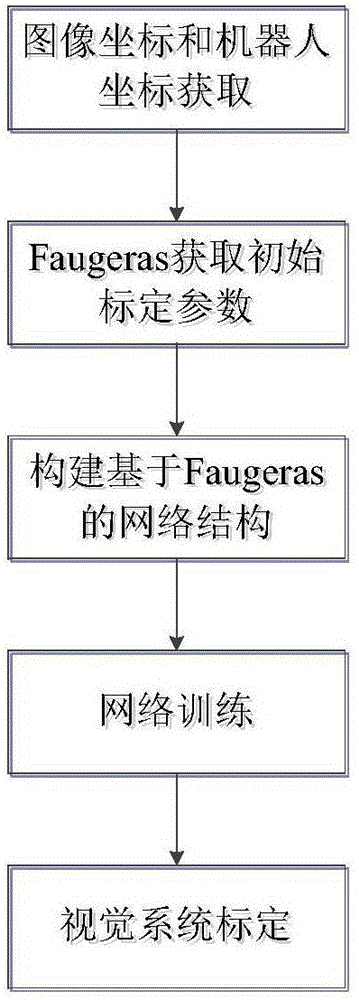
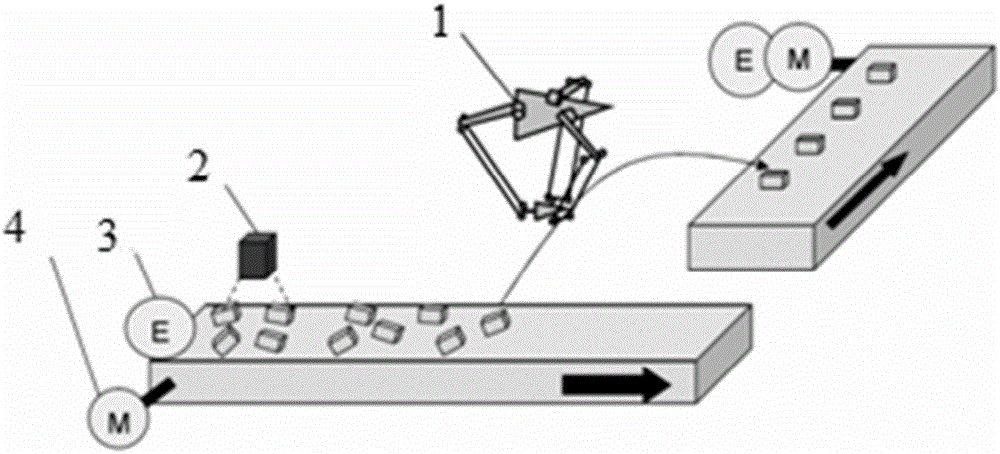
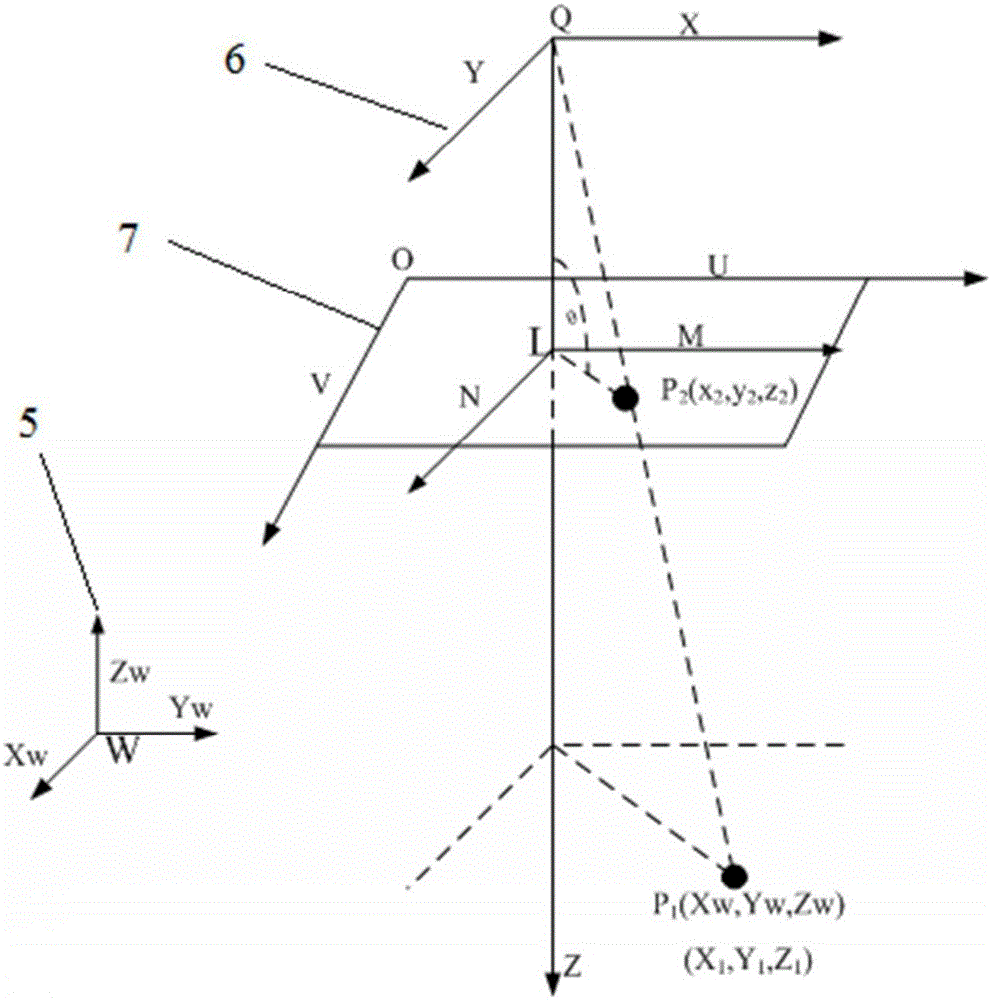
[0027] The present invention uses the image processing algorithm to obtain 160 groups of image coordinates and corresponding Delta robot coordinates from the camera shooting, for network training and experiments, and uses the Faugeras calibration algorithm to obtain the network initial value and network structure, because the initial value and the network structure are relatively close The real model can reduce the number of iterations of network training and improve the calibration efficiency. Specifically, it includes deriving the Faugeras calibration algorithm suitable for the Delta robot vision system according to the positional relationship between the robot and the camera; using the Faugeras calibration algorithm to obtain the linear internal parameters and linear external parameters of the vision system calibration, and use them as the initial weight of the neural network And bias, because the initial weight and bias are close to the real value, it can speed up the netwo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More