

Tendon-connecting rod hybrid transmission type three-degree-of-freedom mechanical finger and control method
A technology of mechanical fingers and middle fingers, applied in the field of industrial robots, can solve the problems of less freedom and poor adaptability to the space environment, and achieve the effects of improving reliability, saving quantity and reducing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
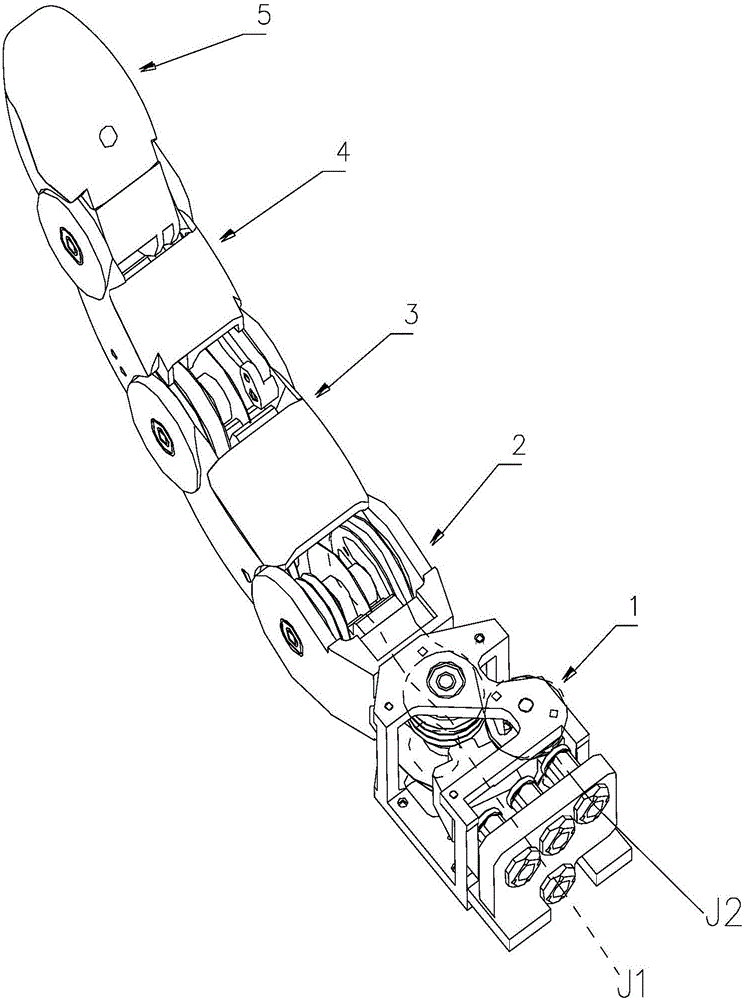
[0038] When the driving tendon J1 is pulled, the proximal knuckle housing 3-3 and the base knuckle housing 2-1 undergo relative bending rotation, which is manifested as that the proximal knuckle housing 3-3 is relative to the base knuckle housing 2-1 bending movement;
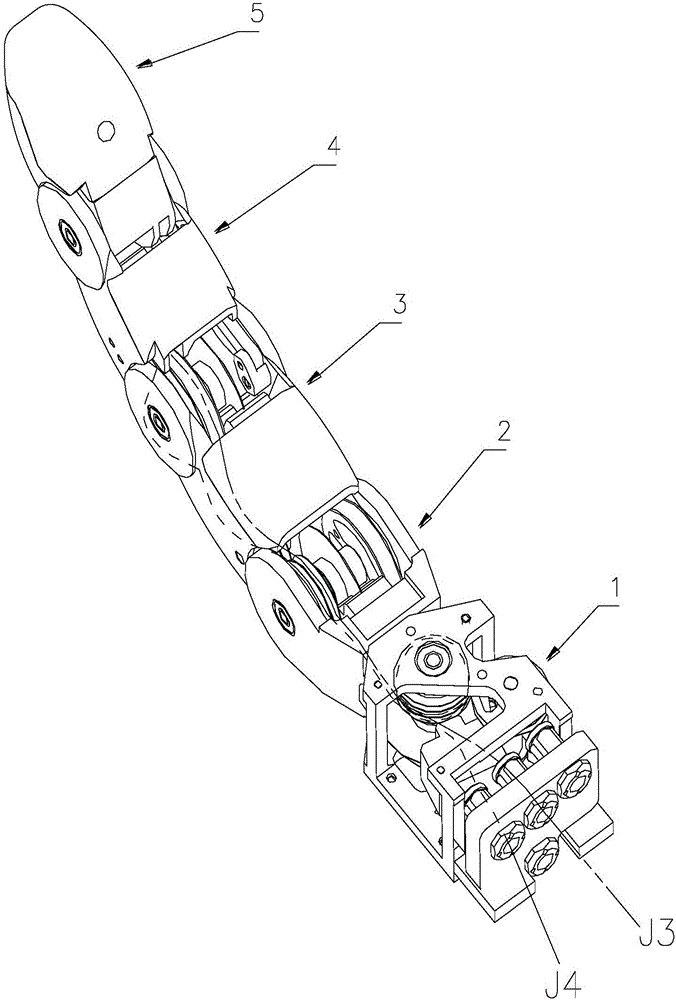
[0039] When the driving tendon J2 is pulled, the proximal knuckle housing 3-3 and the base knuckle housing 2-1 are relatively expanded and rotated, which is manifested as that the proximal knuckle housing 3-3 is relative to the base knuckle housing 2-1 When the driving tendon J3 is pulled, the middle knuckle shell 4-1 and the proximal knuckle shell 3-3 are relatively bent and rotated, showing that the middle knuckle shell 4-1 is relative to the proximal knuckle shell 3 -3 bending movement, since the middle knuckle shell 4-1 and the far knuckle shell 5-1 realize the coupling linkage through the connecting rod 4-3, so the middle knuckle shell 4-1 and the proximal knuckle shell When relative bending and rotation ...
specific Embodiment approach 2
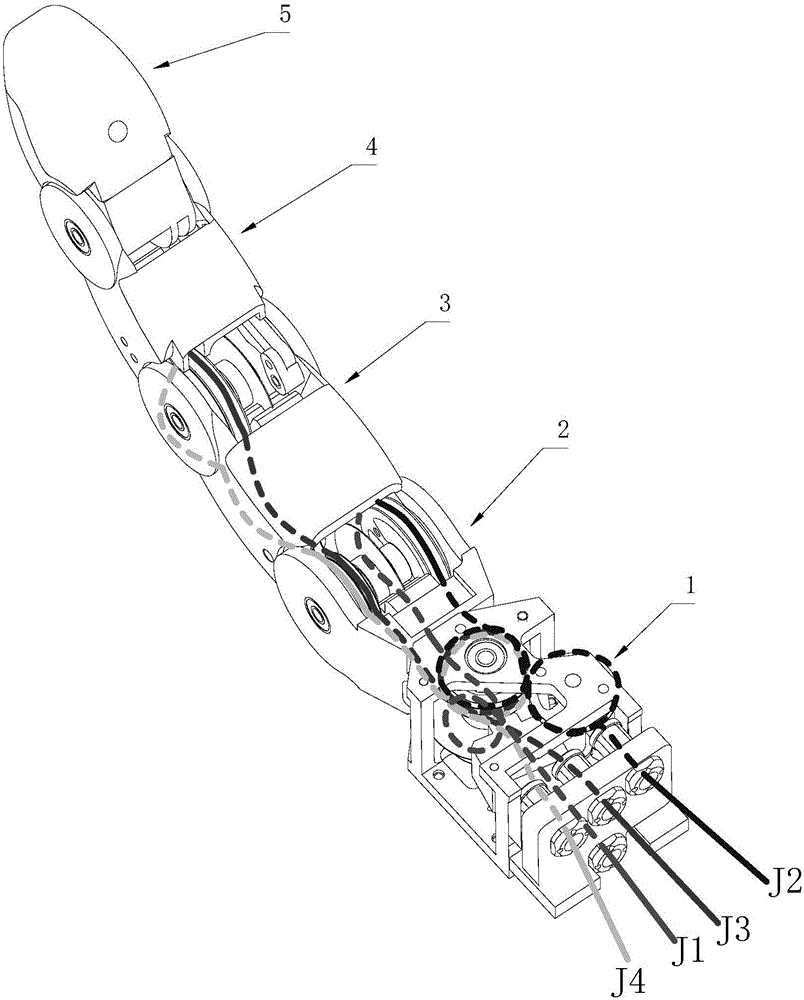
[0040] Specific implementation plan two: combine figure 1 , figure 2 This embodiment will be described. When the driving tendons J1 and J2 are pulled at the same time, the base knuckle housing 2-1 will rotate around the rotation axis 1-7 relative to the base bracket 1-6, and the fingers will rotate around the rotation axis 1-7 along the pulling force. The lateral deflection of the generated moment direction (clockwise lateral deflection); when the driving tendons J3 and J4 are pulled simultaneously, the base knuckle housing 2-1 will rotate around the rotation axis 1-7 relative to the base bracket 1-6 The rotation of the finger is manifested as the lateral deflection (counterclockwise lateral deflection) of the finger along the moment direction generated by the pulling force around the rotation axis 1-7.
specific Embodiment approach 3
[0041] Embodiment 3: When the fingers are bent, unfolded, and sideways as described in Embodiments 1 and 2, the rotation angle and rotation speed of the middle knuckle housing 4-1 relative to the proximal knuckle housing 3-3 pass through The encoder 3-6 measures; the rotation angle and the rotation speed of the proximal knuckle housing 3-3 relative to the base knuckle housing 2-1 are measured by the encoder 2-5; the base knuckle housing 2-1 is relative to the base knuckle housing The rotation angle and rotation speed of seat bracket 1-6 are measured by encoder 1-13; the driving tension of driving tendon J1, J2, J3, J4 is carried out by tension sensor 1-1, 1-2, 1-3 and 1-4 Measurement: the six-dimensional force sensor 5-2 installed on the far knuckle shell 5-1 realizes the measurement of the contact force between the far knuckle cover 5-3 and the grasped object. The information measured by these sensors is passed to the control system for controlling the movements of the finger...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More