

Magnetic navigation AGV (Automatic Guided Vehicle) linear route correcting method based on proportional differential regulation
A proportional differential and magnetic navigation technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of complex control strategies, low precision, and large energy consumption, and achieve the effects of ensuring stability, eliminating position deviation, and meeting the needs of industrial use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
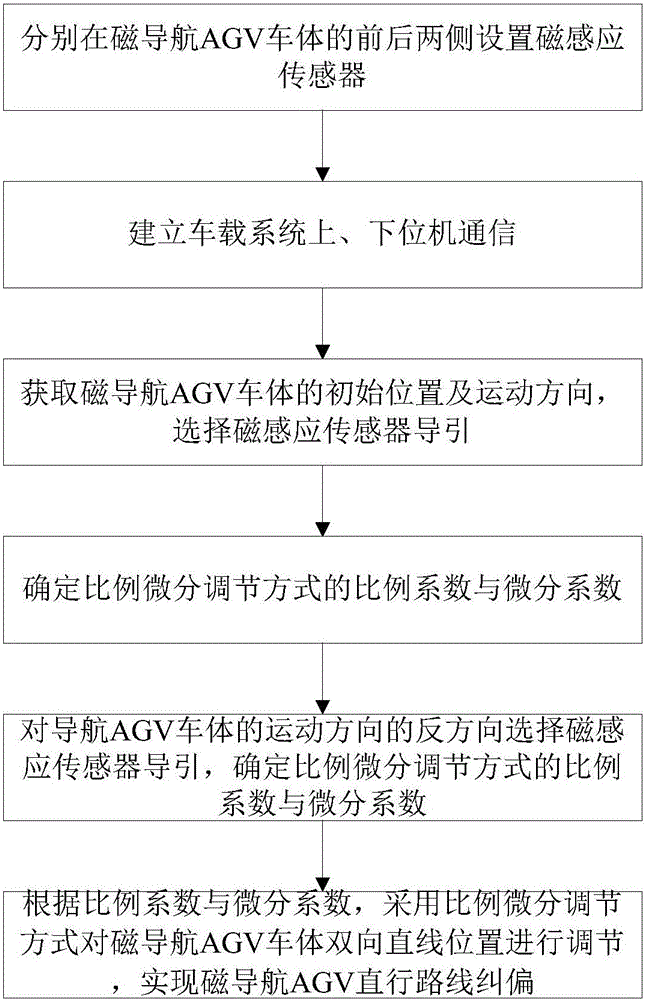
[0041] Such as figure 1 As shown, it is a schematic flow chart of the method for correcting the straight line of the magnetic navigation AGV based on the proportional differential adjustment of the present invention. A method for rectifying the straight line of a magnetic navigation AGV based on proportional differential adjustment, comprising the following steps:
[0042] A. Set magnetic induction sensors on the front and rear sides of the magnetic navigation AGV body;
[0043] B. Use the PLC to upload the information collected by the magnetic induction sensor in step A to the industrial compute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More