

Fire control detection rapid moving robot platform
A fast-moving, robotic technology, applied to the mobile platform of robots and the field of fast-moving robot platforms for fire detection, can solve the problems of less shock absorption design, can not meet the needs of fire detection applications, etc., and achieve the effect of light crawler.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Embodiments of the present invention will be described in detail below, and the embodiments described with reference to the accompanying drawings are exemplary and are only used to explain the present invention, and should not be construed as limiting the present invention.
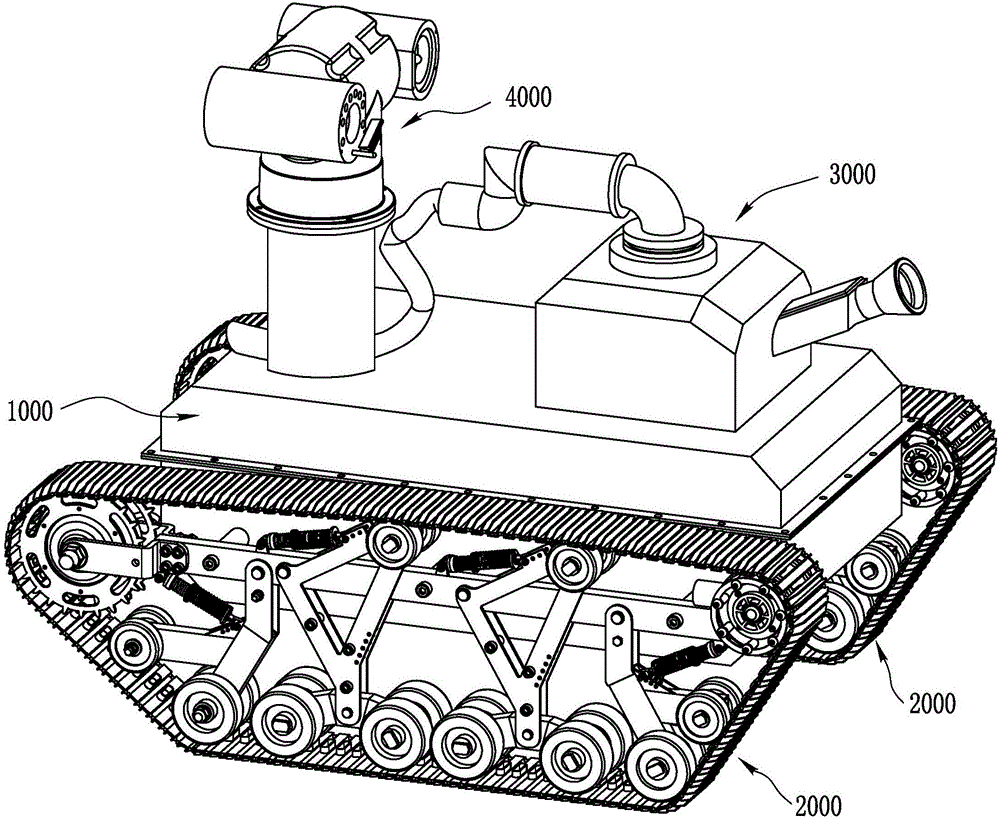
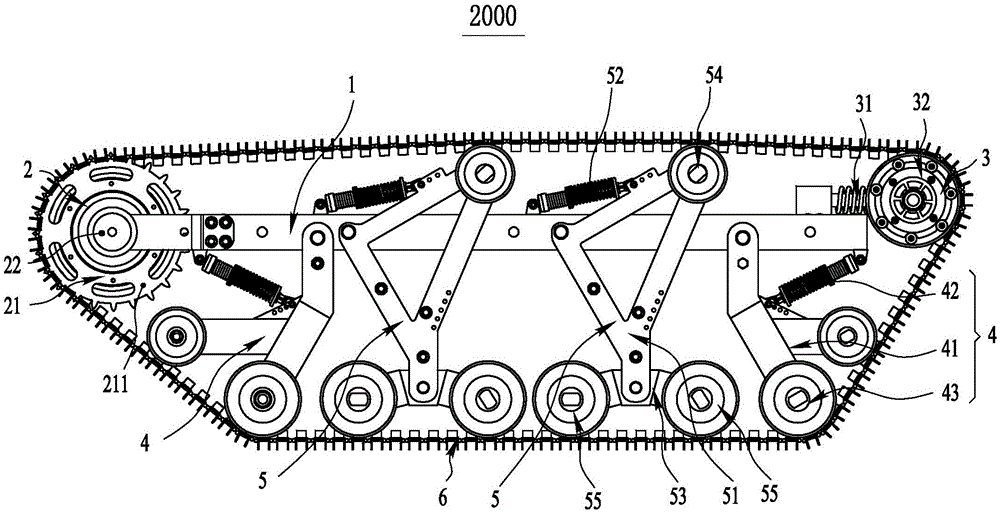
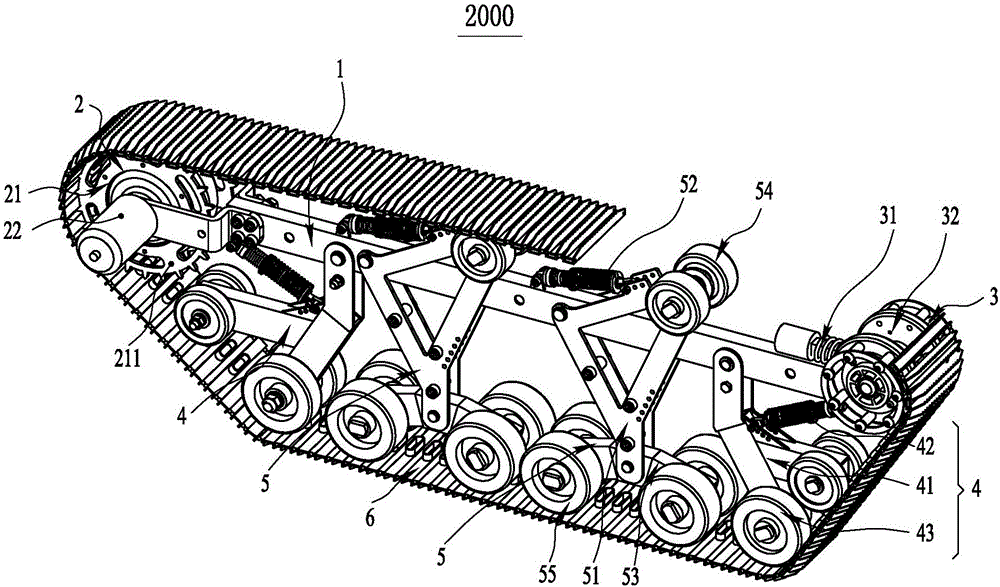
[0047] In some embodiments of the present invention, the fire detection fast mobile robot platform, such as figure 1 Shown, comprise: main car body 1000 and crawler belt running part 2000, crawler belt running part 2000 is two, links to each other with the both sides of main car body 1000; figure 2 , image 3 As shown, the crawler running part 2000 includes: a crawler main frame 1 , a driving wheel assembly 2 , a main steering wheel assembly 3 , a lower steering wheel assembly 4 , a crawler suspension assembly 5 and a crawler belt 6 . The crawler main frame 1 is connected to the side of the main car body 1000; the driving wheel assembly 2 includes a driving wheel 21 and a driving member 22, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More