

S-shaped acceleration and deceleration control method for changing speed and position of object on line
A technology of acceleration and deceleration control and target speed, applied in digital control, program control, electrical program control, etc., can solve problems such as complex algorithms, vibration and noise, and discontinuous acceleration curves
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0270] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
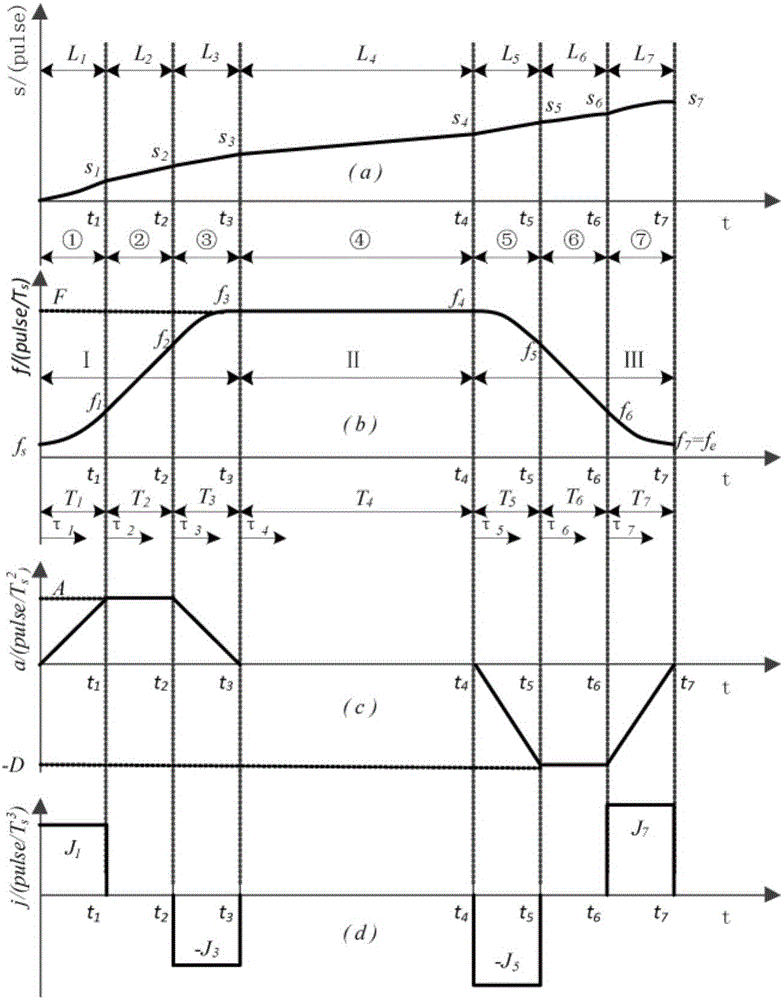
[0271] Such as figure 1 Shown is a schematic diagram of the speed planning of the S-curve acceleration and deceleration control method. The process of the S-shaped acceleration and deceleration control method proposed by the present invention can be divided into acceleration zone I, constant velocity zone II and deceleration zone III. Acceleration zone Ⅰ includes acceleration and acceleration section ①, uniform acceleratio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More