

Lower limb assistance mechanical outer skeleton
An exoskeleton and mechanical technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor movement stability of lower limbs, difficult to popularize and use, and expensive, and achieve convenient operation, improve energy utilization, manufacture and use. low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
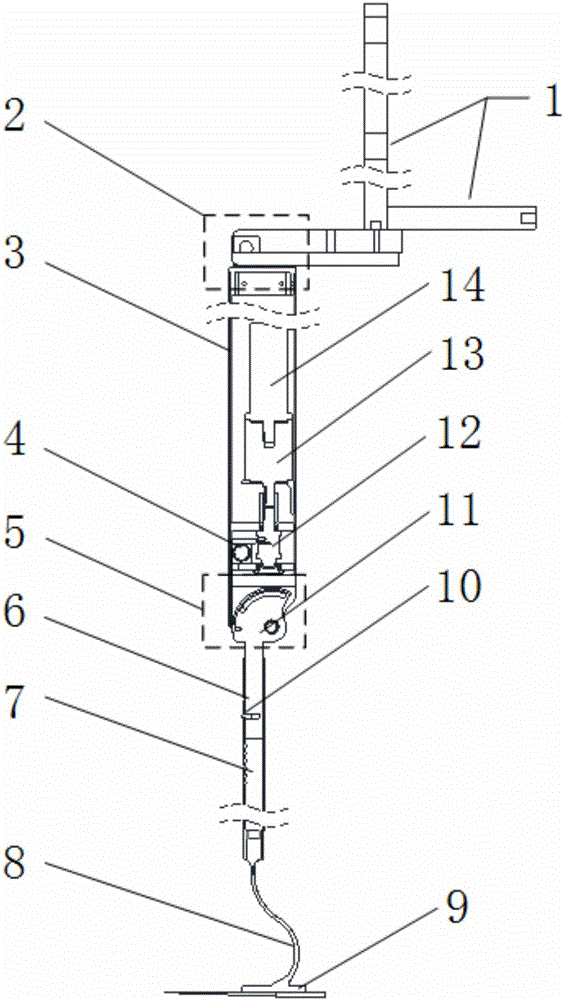
[0032] Such as figure 1 , 3 , Shown in 4, a kind of lower limb assist mechanical exoskeleton, it comprises:
[0033] back support 1;
[0034] thigh part 3, the top of the thigh part 3 is hinged with the back support 1 through the hip joint 2;
[0035] a calf part, the top of which is hinged to the bottom of the thigh part 3 via the knee joint 5;
[0036] Knee joint drive mechanism, the knee joint drive mechanism drives the knee joint 5 to move, so that the calf part rotates relative to the thigh part 3 through the knee joint 5;
[0037] The sole of the foot 9, the sole of the foot 9 is connected with the bottom of the calf part through the ankle joint.
[0038] Such as figure 1 As shown, the ankle joint is an elastic body ankle joint 8 capable of storing and releasing elastic potential energy, the top of the ankle joint is fixedly connected with the calf part, and the bottom of the ankle joint is fixedly connected with the sole of the foot 9 .
[0039] Wherein, the lower...
Embodiment 2
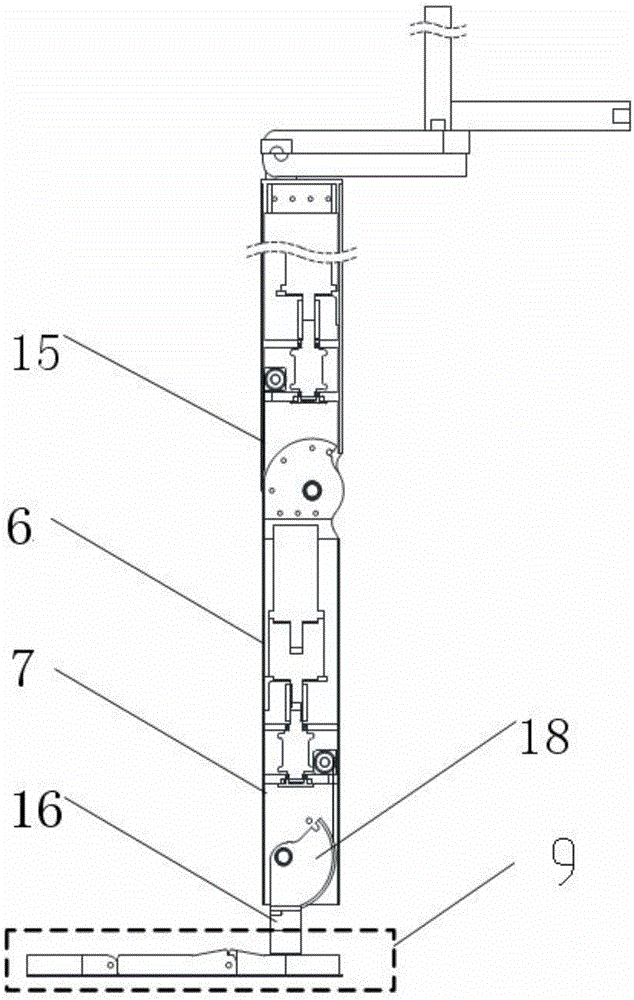
[0049] The structure of this embodiment is basically the same as that of Embodiment 1, the difference is: as Figure 2-4 As shown, the ankle joint is an external force-driven ankle joint 16, the sole of the foot 9 is hinged with the bottom of the lower leg through the external force-driven ankle joint 16, and it also includes driving the external force-driven ankle joint 16 to move The ankle joint drive mechanism that makes the sole 9 rotate relative to the calf part through the external force-driven ankle joint 16; wherein, the external force-driven ankle joint 16 and the knee joint 5 have the same structure, and the ankle joint drive mechanism and the knee joint drive The mechanism structure is the same, the bracket of the external force-driven ankle joint 16 is an ankle joint bracket, and the ankle joint bracket is fixedly connected to the top of the calf part, and the rotating body of the external force-driven ankle joint 16 is an ankle joint rotating body 18, and the ankle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More