

Oil sac and propeller hybrid control ROV underwater hovering and definite depth control device
A hybrid control and control device technology, which is applied to underwater ships, underwater operation equipment, transportation and packaging, etc., can solve the problems of large energy consumption, poor adaptability to gravity and buoyancy changes, etc., and achieve extended battery life and low power The effect of low power consumption, low static suspension and fixed depth work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The purpose of the present invention is to overcome the defects of poor adaptability to gravity and buoyancy changes and large energy consumption of existing ROV underwater depth determination and hovering control devices, and provide a ROV underwater positioning system that can flexibly control ROV buoyancy and reduce energy consumption. Deep and hover controls.
[0025] In order to achieve the above-mentioned goals, the technical solution adopted by the present invention is a kind of ROV underwater hovering and depth-fixing control device mixedly controlled by an oil bag and a propeller, comprising:
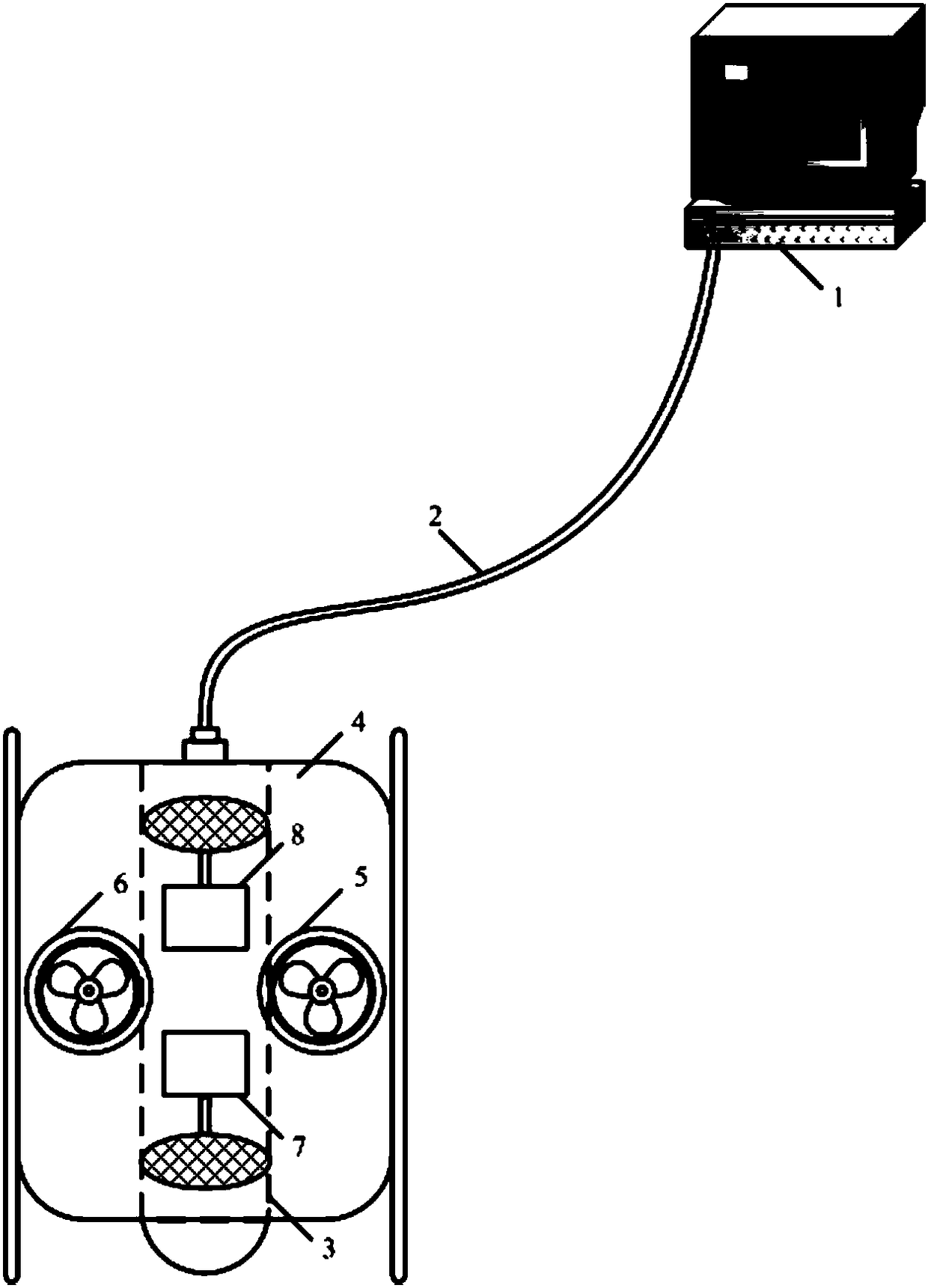
[0026] First determine the overall scheme of the ROV underwater hovering and depth-fixing control system. The overall scheme of the ROV underwater hovering and depth-fixing control system is as follows: figure 1 As shown, it is mainly composed of control box 1, umbilical cable 2, ROV control system 3, ROV sealed and pressure-resistant shell 4, port side vertical thruster...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More