

Method and system for monitoring speed of unmanned plane
A technology of speed monitoring and drones, applied in the field of drones, can solve the problems of high processor chip requirements and complicated calculation process, and achieve the effect of simple calculation, small calculation amount and accurate results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0077] Please refer to figure 2 , Embodiment 1 of the present invention is:
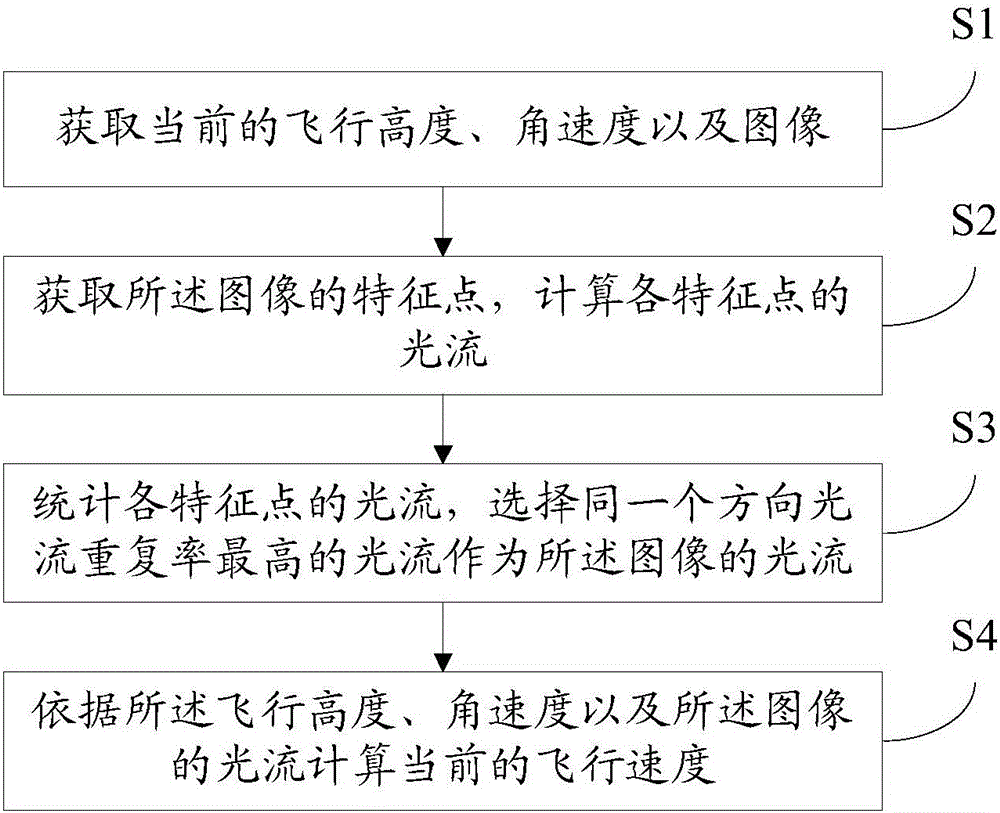
[0078] A method for monitoring the speed of an unmanned aerial vehicle, comprising:
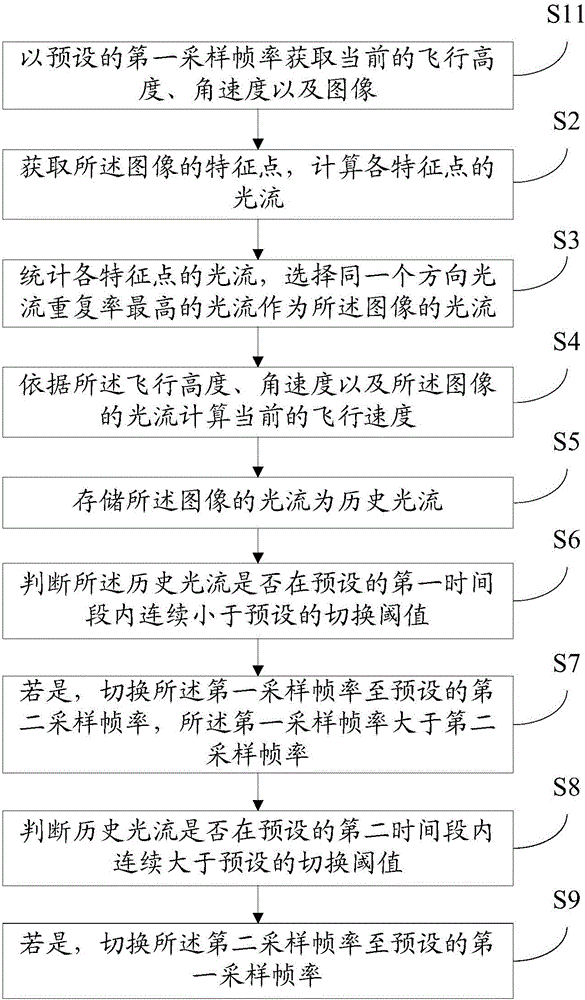
[0079] Obtain the current flying height, angular velocity and image with the preset first sampling frame rate; specifically, measure the flying height through the ultrasonic altimetry module, and measure the angular velocity through the three-axis angular velocity measurement module; the camera includes But not limited to the network camera module, the image direction of the camera is consistent with the direction of the drone, the imaging plane of the camera is parallel to the horizontal plane of the drone, and the optical axis of the camera is perpendicular to the plane of the drone and faces the ground. Shooting; the ultrasonic altimetry module includes but is not limited to a single-head ultrasonic module that integrates sending and receiving and a double-head ultrasonic that separates sending and receiving; t...
Embodiment 2
[0088] Please refer to Figure 4 , the second embodiment of the present invention is:
[0089] An unmanned aerial vehicle speed monitoring system corresponding to the unmanned aerial vehicle speed monitoring method of the first embodiment above, comprising:
[0090] An acquisition module 1, configured to acquire the current flight height, angular velocity and image at a preset first sampling frame rate;
[0091] The optical flow calculation module 2 is used to acquire the feature points of the image, and calculates the optical flow of each feature point; the optical flow calculation module 2 includes: a first acquisition module 21, which is used to acquire the described image using the FAST corner detection algorithm. The position and the feature value of each feature point of the image; the second acquisition module 22, for adopting the FAST corner detection algorithm to obtain the position and feature value of each feature point in the previous frame image; calculation modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More