

A tactile three-dimensional force detection method based on micro vision
A detection method and three-dimensional force technology, which can be applied in neural learning methods, image analysis, image enhancement and other directions, and can solve problems such as inability to detect tangential force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
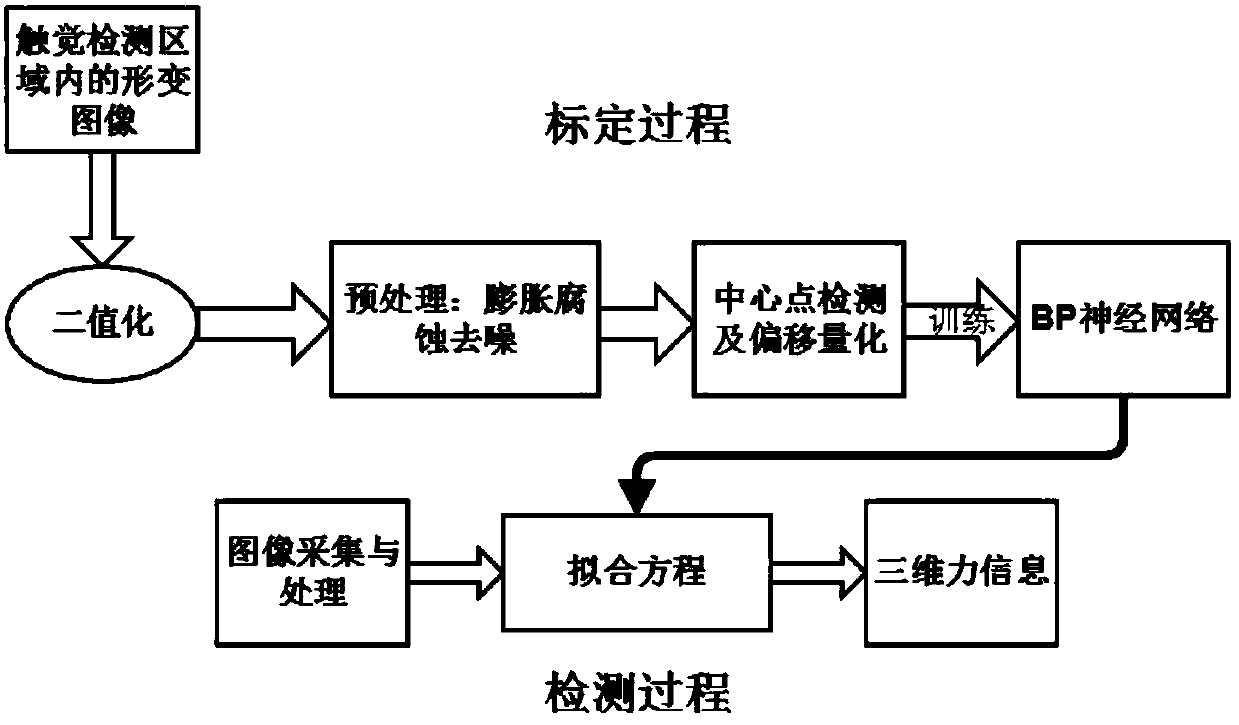
[0054] The micro-vision-based tactile three-dimensional force detection method proposed by the present invention has a flow chart as shown in figure 1 shown, including the following steps:
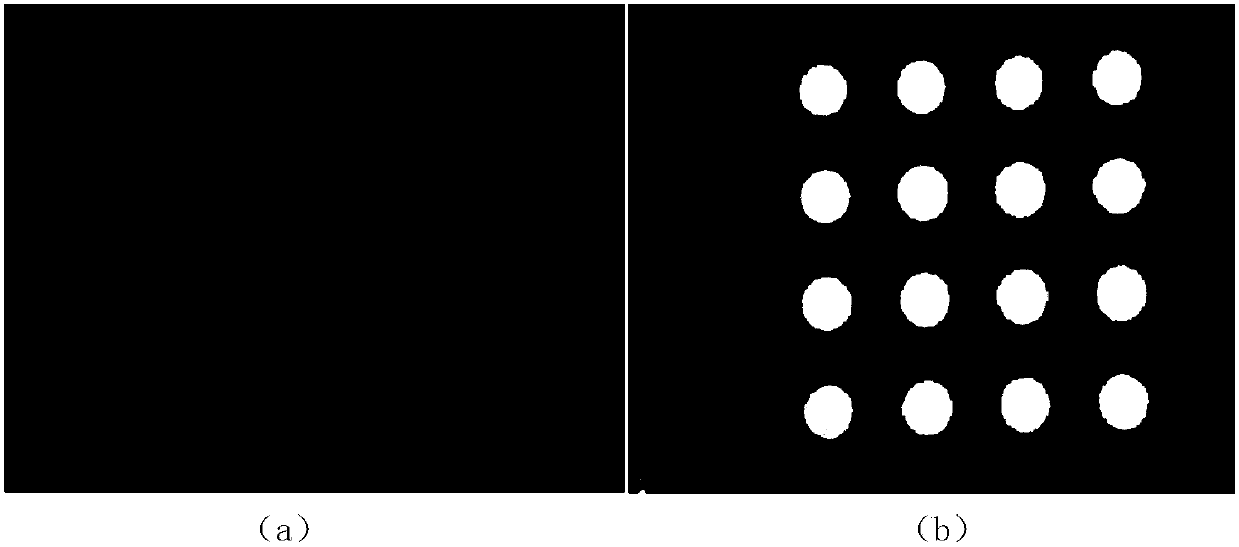
[0055] (1) In the initial static collection of the deformed image of the elastic body with marked points in the tactile detection area, the deformed image is sequentially processed in gray scale and binarized to obtain the binarized image of the deformed image, and the pixels in the binarized image The value of the point is 0 or 1, 0 represents a white point, 1 represents a black point, and the binarized image is recorded as X;
[0056] (2) Set a matrix unit Y with a structural element of 5x5, the value of the matrix unit Y is 0, and the center point of the matrix unit Y overlaps with the pixel point a on the above-mentioned binarized image X, if the binarization All the pixels in the overlapping part of the image X and the matrix unit Y are 0, then the value of the pixel a on the binariz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More