

Collaborative consensus method for multiple unmanned vehicles based on Markov random field
A consistent and random field technology, applied in synchronization devices, wireless communications, climate sustainability, etc., can solve problems such as the difficulty of multi-unmanned aerial vehicle collaborative consensus algorithms, frequent changes in network topology, and no network center nodes. Achieve the effects of insensitivity to topology scale changes, high coordination time and offset errors, and reduced message volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
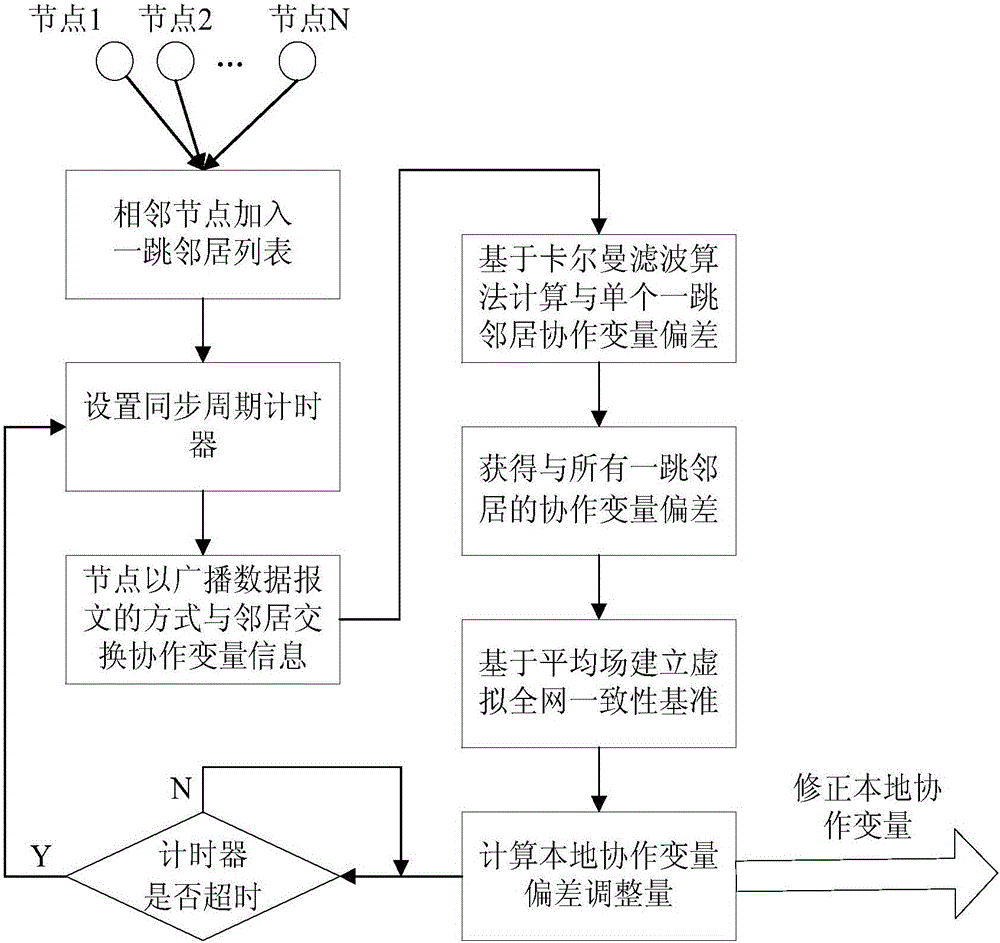
[0028] refer to figure 1 . The specific steps of the multi-unmanned aerial vehicle collaborative consistency method based on the Markov random field of the present invention are as follows:
[0029] Assuming that the multi-unmanned vehicle network contains M nodes, the consensus method of multi-unmanned vehicles based on Markov random field can be described as follows:
[0030] 1) Adjacent nodes are added to the one-hop neighbor list of the local node for initialization, and the cooperative variable deviation of the node is initialized to 0.
[0031] 2) Set the synchronization cycle timer.
[0032] 3) Iterative calculation until the convergence accuracy is satisfied.
[0033] 4) The kth iteration.
[0034] 5) M nodes perform bidirectional variable data exchange with their neighbors in the form of data packets in each synchronization cycle.
[0035] 6) In the kth iteration, the node packs the local k-1th transmission cooperation variable and the cooperation variable of all...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More