

Unmanned aerial vehicle autonomous navigation system and navigation method
An autonomous navigation system and UAV technology, applied in the field of UAV autonomous navigation system, can solve the problems that UAVs cannot realize autonomous flight, cannot judge the route and flight path by themselves, and rely on GPS satellite signals, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
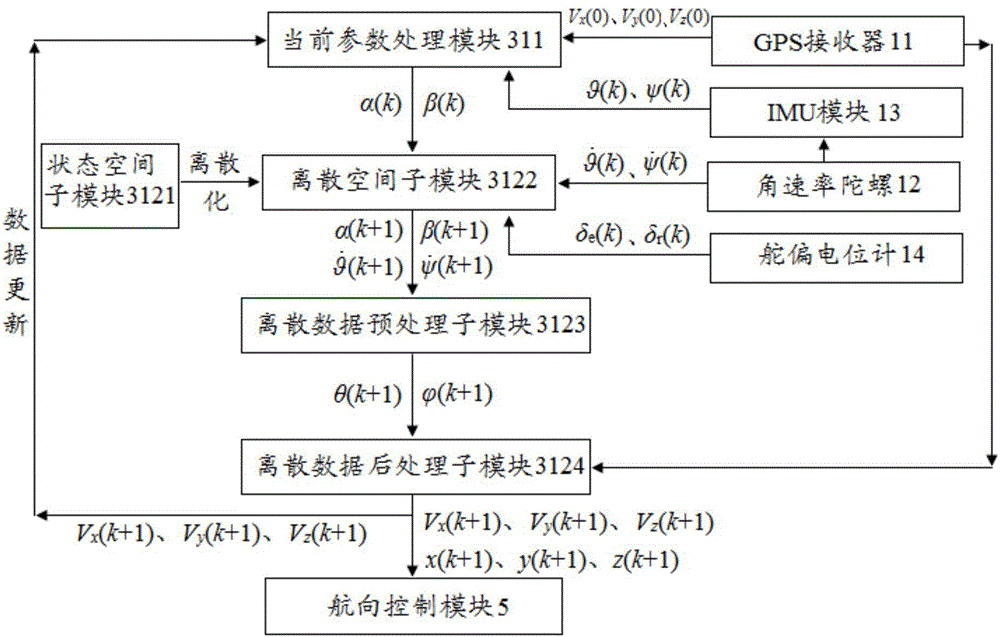
[0079] According to a preferred embodiment of the present invention, the discretization space sub-module 3122 is used to discretize the state space in the pitch direction and the state space in the yaw direction in the state space sub-module 3121 to obtain discrete spaces.
[0080] Among them, when discretizing, the Taylor formula is used to expand, and the first two items are taken to achieve linearization.
[0081] In a further preferred embodiment, the state space in the pitch direction and the state space in the yaw direction are discretized by the discretization space sub-module 3122 to obtain discrete spaces in the pitch direction as shown in formula (3-1) and formula (3-2) and yaw direction discrete spaces:
[0082]
[0083] Among them, in formula (3-1), T is the sampling period, k represents the current moment, k+1 represents the next moment; α(k+1) is the angle of attack at the next moment, and α(k) is the current moment The angle of attack, α(k) is obtained from ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More