Wearable type rehabilitation training exoskeleton manipulator
A technology of rehabilitation training and exoskeleton, applied in the direction of passive exercise equipment, physical therapy, etc., can solve the problems of high cost of surgery, affecting the living ability and family burden of patients, and increasing the financial burden of patients' families, and achieves a high degree of automation and excellent performance. Promote the value and ensure the effect of rehabilitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
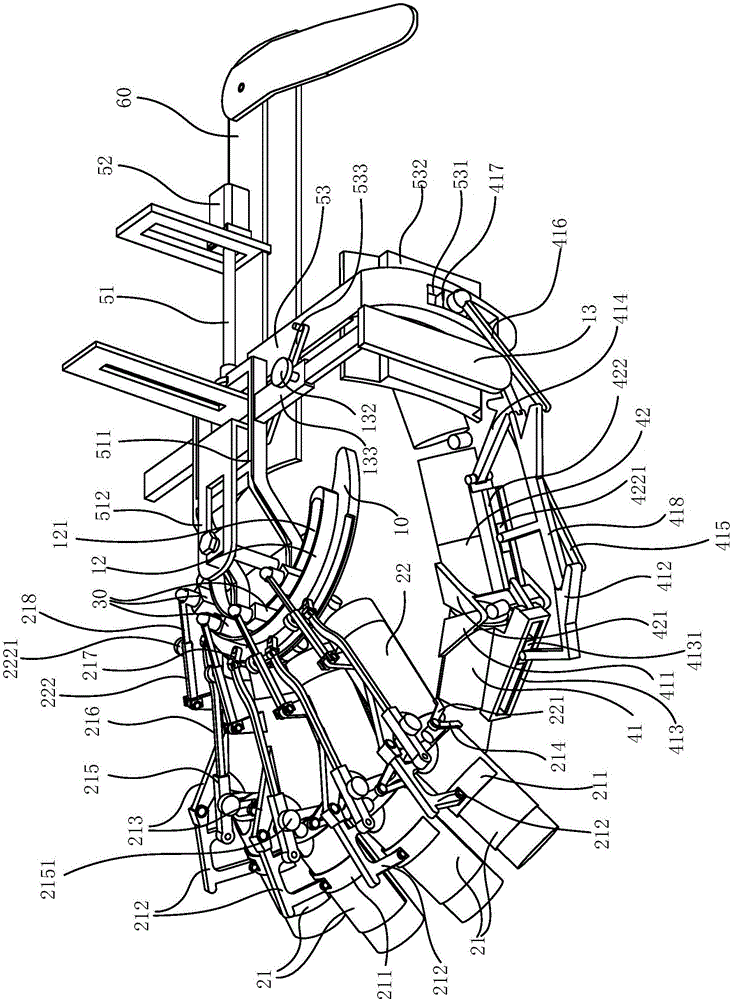
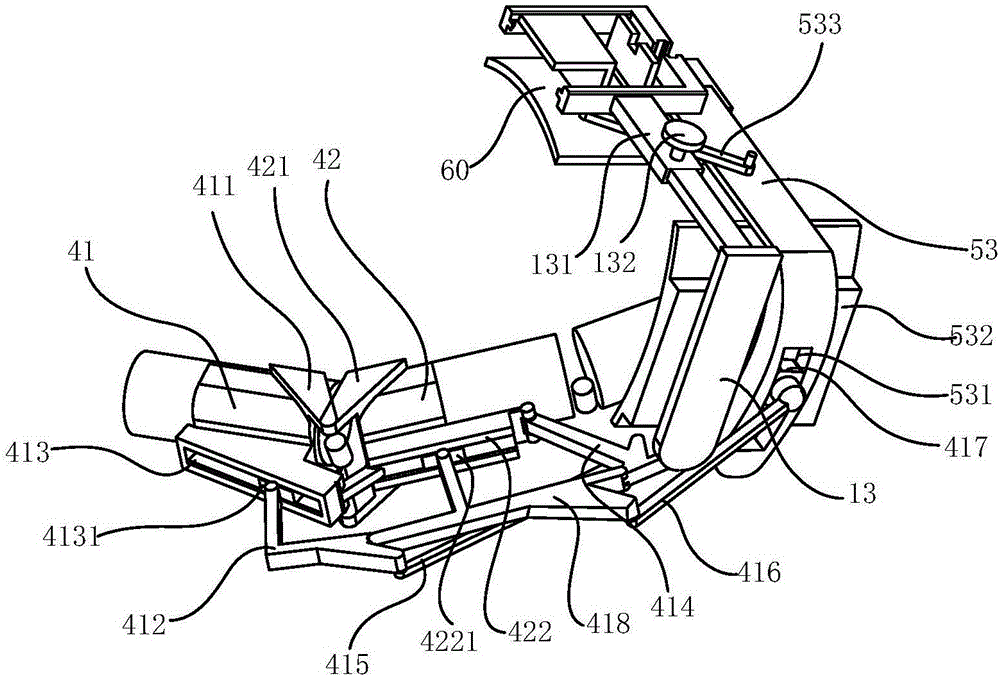
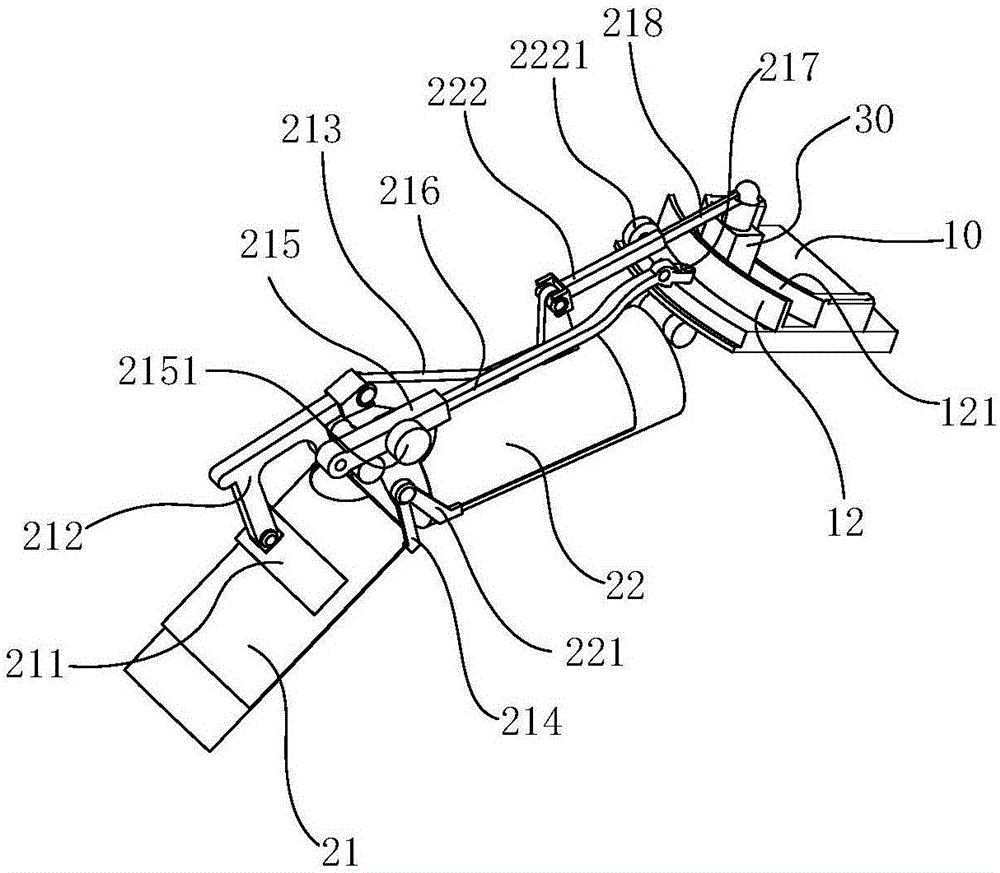
[0024] combine Figure 1 to Figure 5 , the present invention is further described:
[0025] A wearable exoskeleton manipulator for rehabilitation training includes a hand support 10 for connecting finger cots, a four-finger rehabilitation mechanism and a thumb rehabilitation mechanism arranged on the edge of the hand support 10 .
[0026] The four-finger rehabilitation mechanism includes a far finger support rod 21 and a proximal finger support rod 22, the far finger support rod 21 and the proximal finger support rod 22 are hinged and connected by a first link mechanism, and the first link mechanism is connected with the hand The force transmission slider 30 on the support 10 is connected, and the force transmission slider 30 is slidably arranged on the hand support 10. The driving mechanism drives the force transmission slider 30 to move on the hand support 10, and links the far finger support rod 21 And the proximal finger support rod 22 presents a swing action.
[0027] D...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com