

Three-degree-of-freedom bionic eye based on series-parallel control
A technology of degrees of freedom and bionic eyes, applied in the field of bionic robots, can solve the problems of not realizing the three-degree-of-freedom movement of bionic eyes, and achieve the effect of keeping the center position unchanged, high positioning accuracy, and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
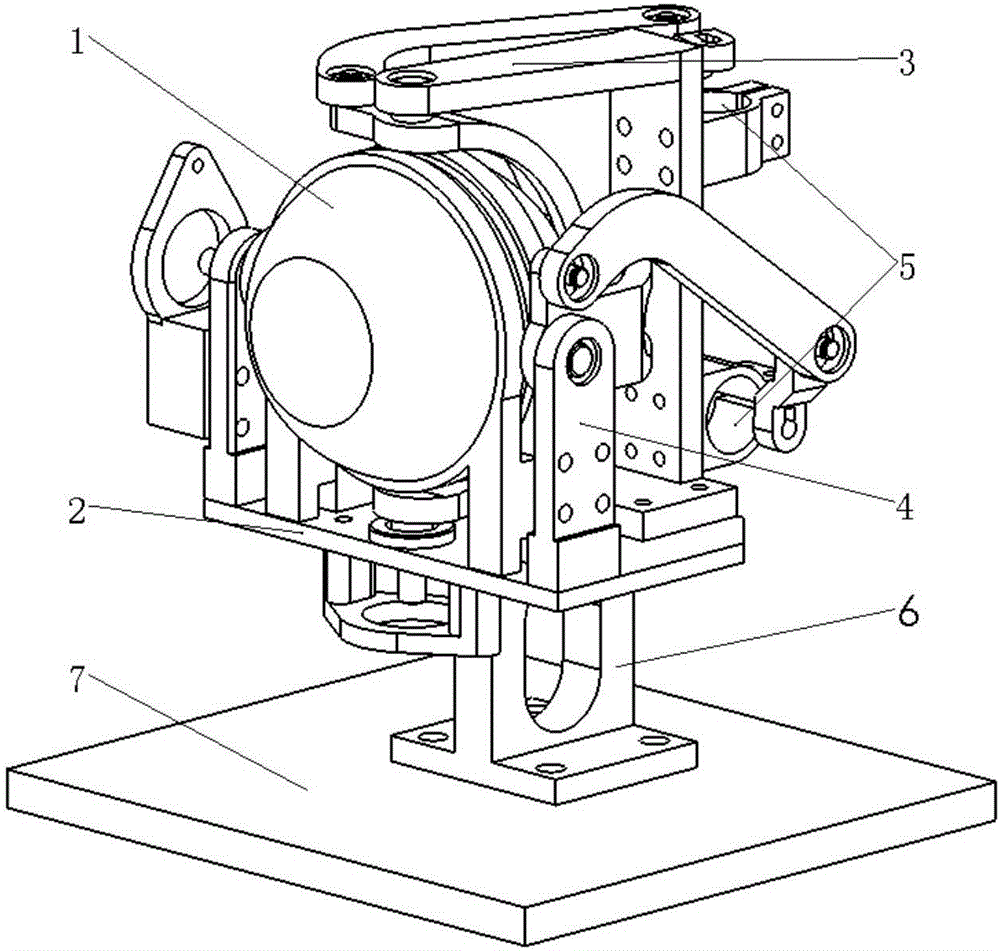
[0020] Referring to the accompanying drawings, the three-degree-of-freedom bionic eye based on serial and parallel control includes: eyeball 1, substrate 2, vertical support 6, horizontal support 7, motor drive part 5, upper four-bar linkage mechanism 3 and right four-bar linkage mechanism 4;
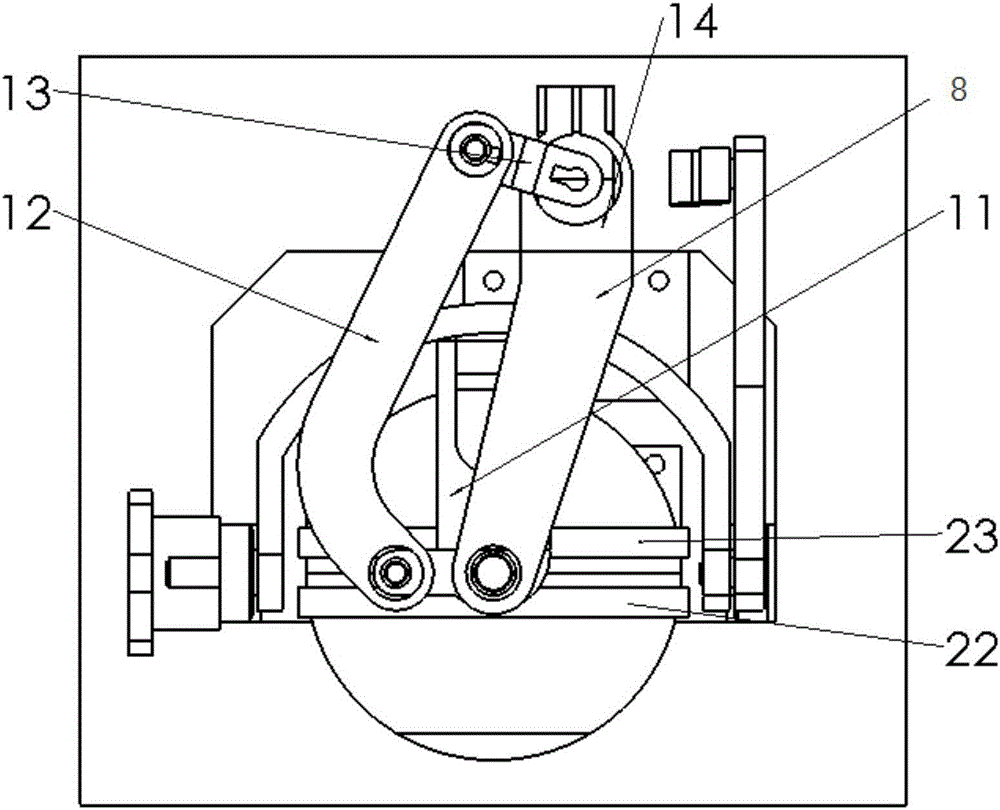
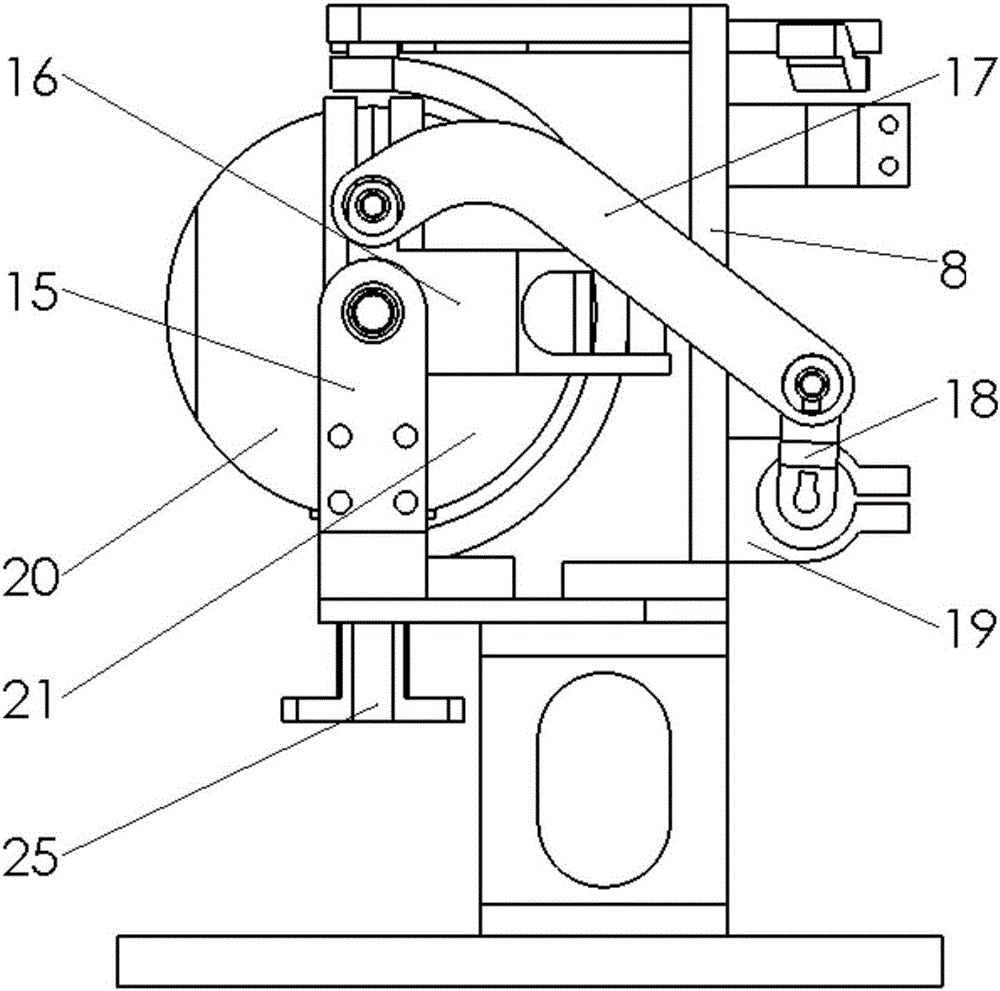
[0021] The eyeball 1 is a spherical cavity structure composed of the front eyeball 20 and the back eyeball 21; Axial translation can only swing up and down or left and right, and the center position of the eyeball remains unchanged; the front eyeball seat 22 and the rear eyeball seat 23 are fixed on the base plate 2; a third motor is provided inside the eyeball 1, and the third motor is used to drive the eyeball 1 The image acquisition sensor inside rotates along the optical axis direction of the eyeball 1, where the series control of the rotation degree of freedom is realized; the center of the outer wall of the posterior eyeball 21 is provided with a shifting block 24;
[0022] The m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More