

Three degrees of freedom bionic eye based on serial and parallel control
A degree of freedom, bionic eye technology, applied in the field of bionic robots, can solve the problem of not realizing the three degrees of freedom motion of the bionic eye, and achieve the effect of keeping the center position unchanged, high positioning accuracy, and simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
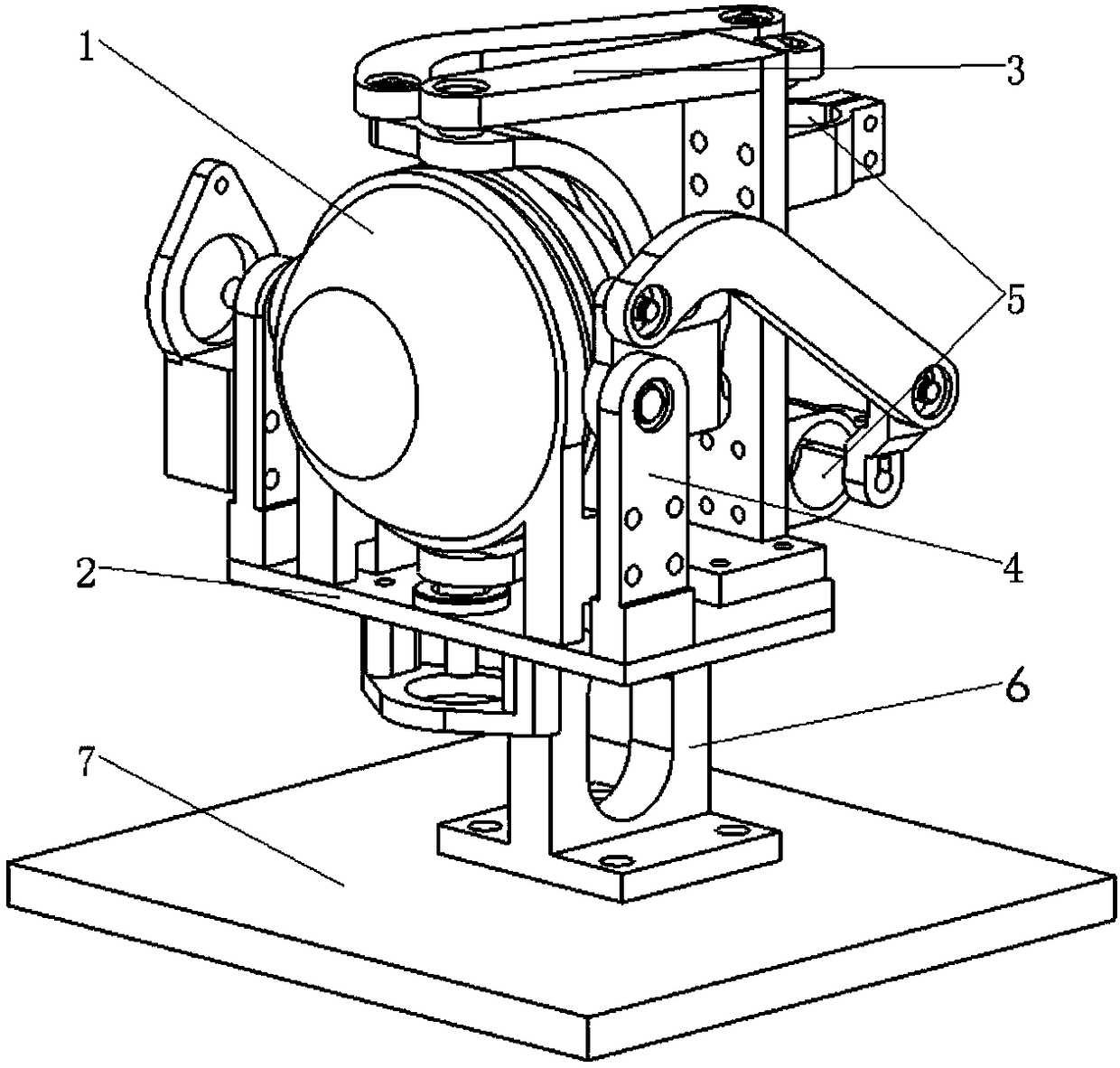
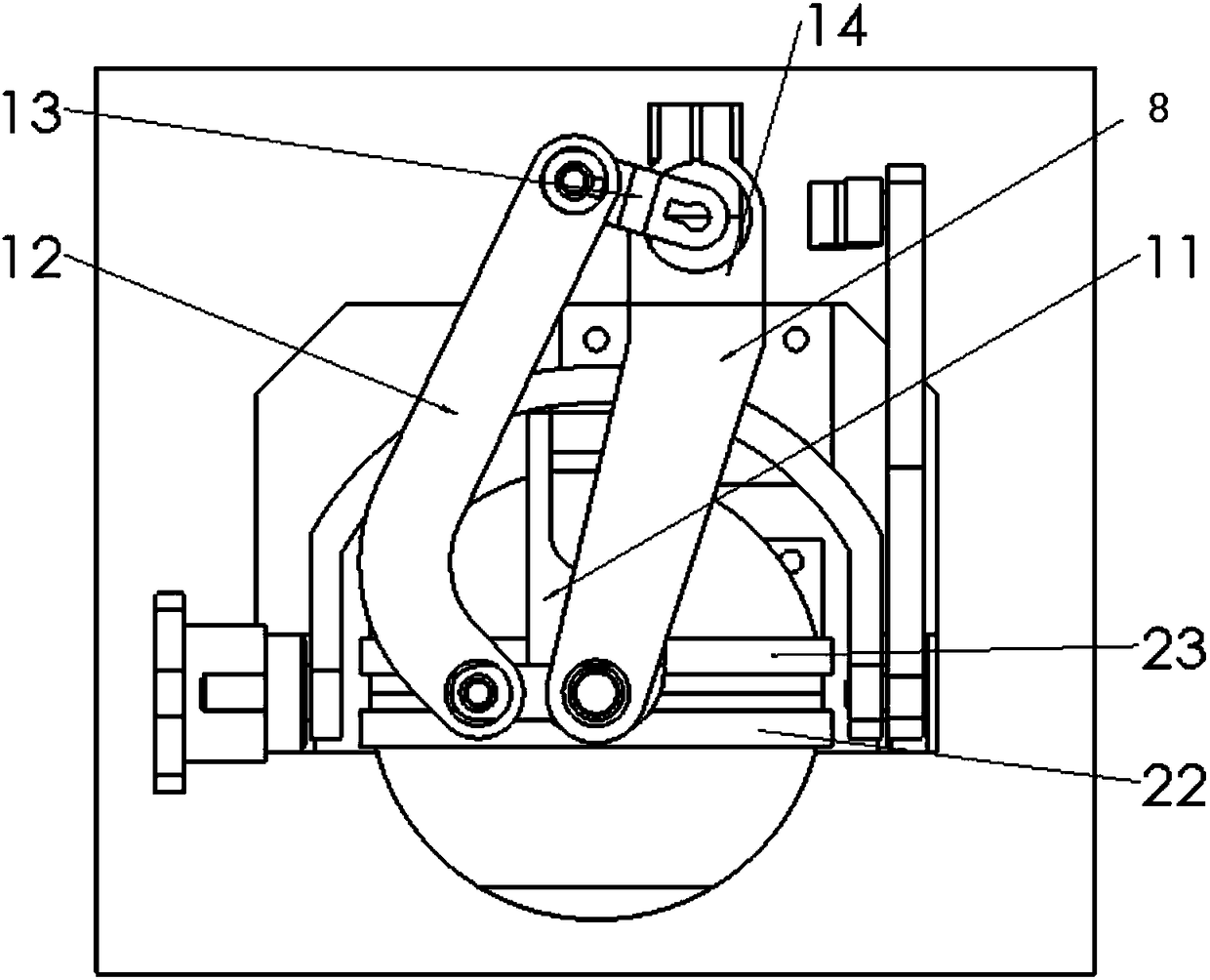
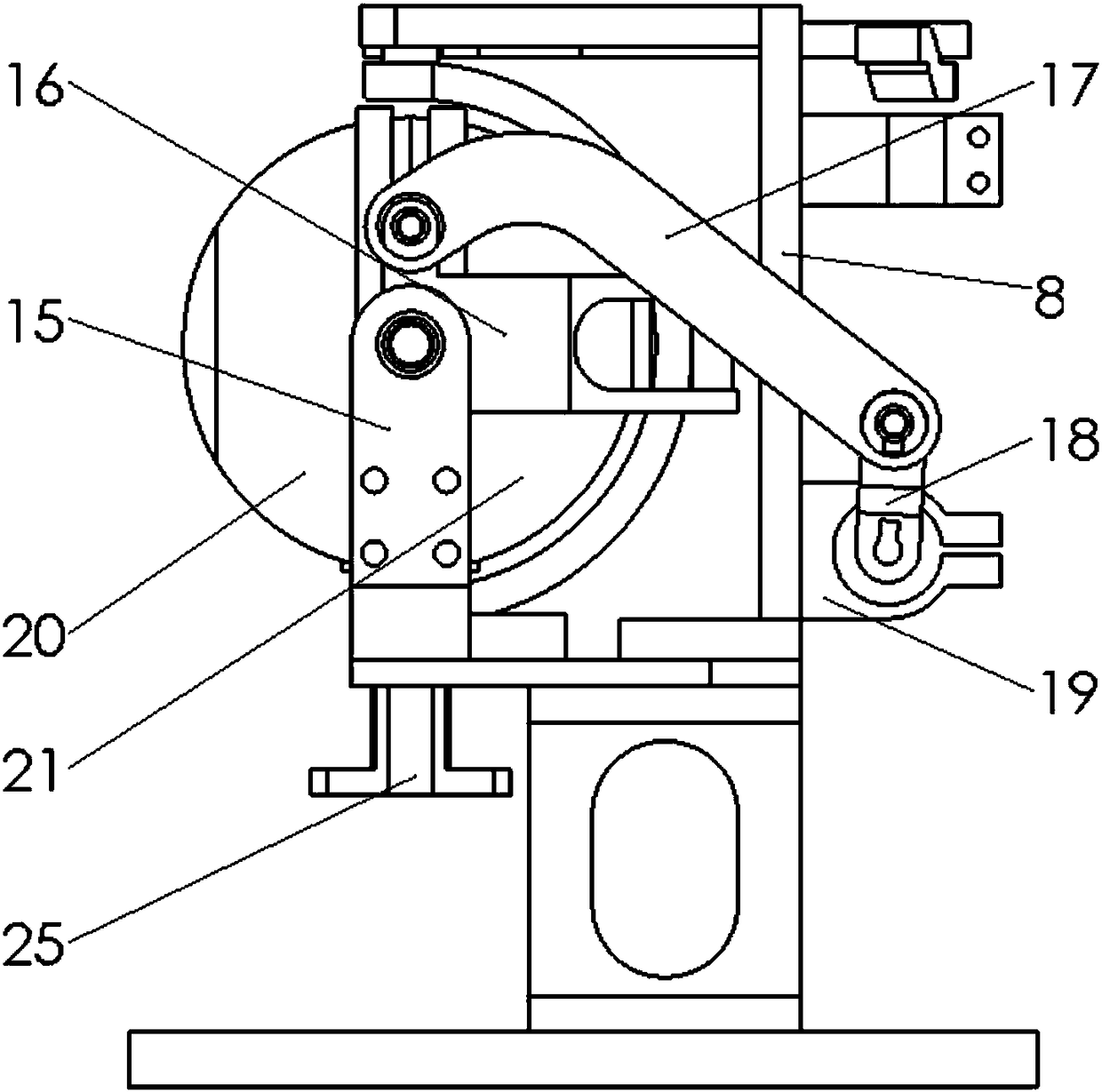
[0020] Referring to the accompanying drawings, the three-degree-of-freedom bionic eye based on series and parallel control includes: eyeball 1, base plate 2, vertical support 6, horizontal support 7, motor drive part 5, upper four-bar linkage mechanism 3 and right four-bar linkage mechanism 4;
[0021] The eyeball 1 is a spherical cavity structure composed of an anterior eyeball 20 and a posterior eyeball 21; The axis translates and can only swing up and down or left and right, and the center position of the eyeball remains unchanged; the front eyeball seat 22 and the rear eyeball seat 23 are both fixed on the base plate 2; the eyeball 1 is provided with a third motor inside, and the third motor is used to drive the eyeball 1 The image acquisition sensor inside rotates along the direction of the optical axis of the eyeball 1, where the serial control of the rotational freedom is realized; a dial 24 is provided at the center of the outer wall of the back of the eyeball 21;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More