

Underwater joint search and rescue robot and system and working method thereof
An underwater robot and underwater machine technology, which is applied in the directions of underwater operation equipment, underwater ships, motor vehicles, etc., can solve the problems such as the inability to quickly and accurately find the objects that are salvaged or located by the seabed samples, and improve the underwater operation. Cycle, reduce water resistance, reduce the effect of power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
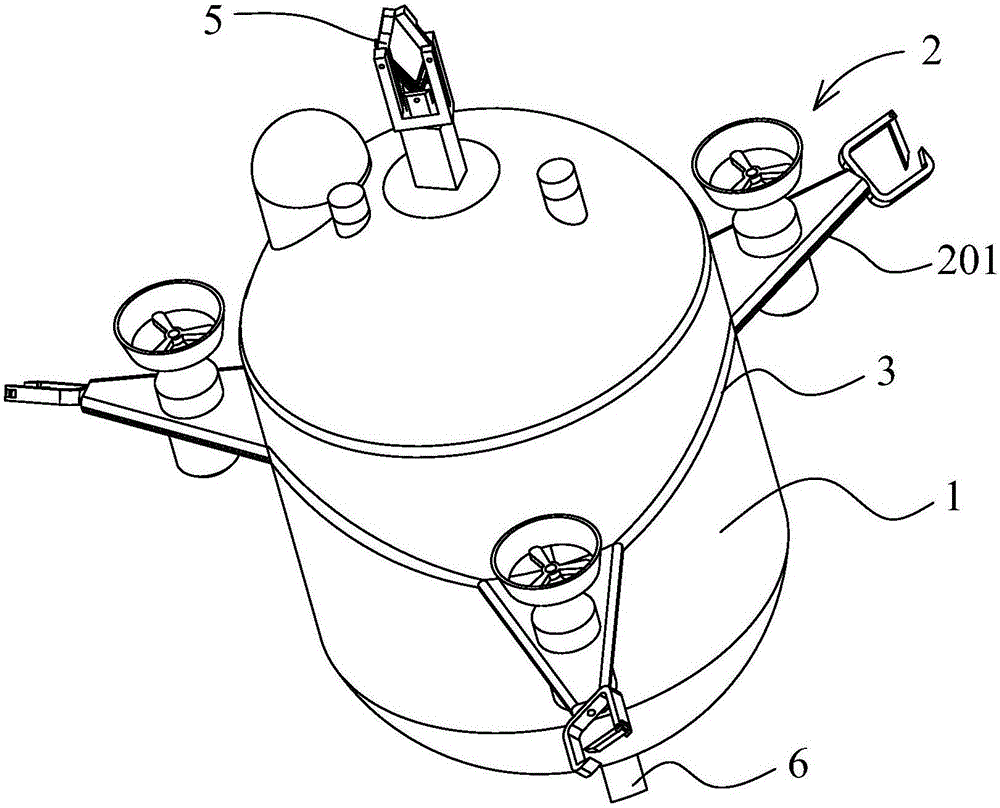
[0030] Such as Figure 1 to Figure 5 As shown, the present embodiment 1 provides an underwater robot, comprising: a main body 1, a power device is provided on the outer wall of the main body 1, and a manipulator 5 is provided at the head end of the main body; a processor module is suitable for controlling the power device To control the underwater robot to travel underwater, and also control the manipulator 5 to realize the grasping action, so as to realize the underwater salvage work; the end of the main body is provided with a clamping end.
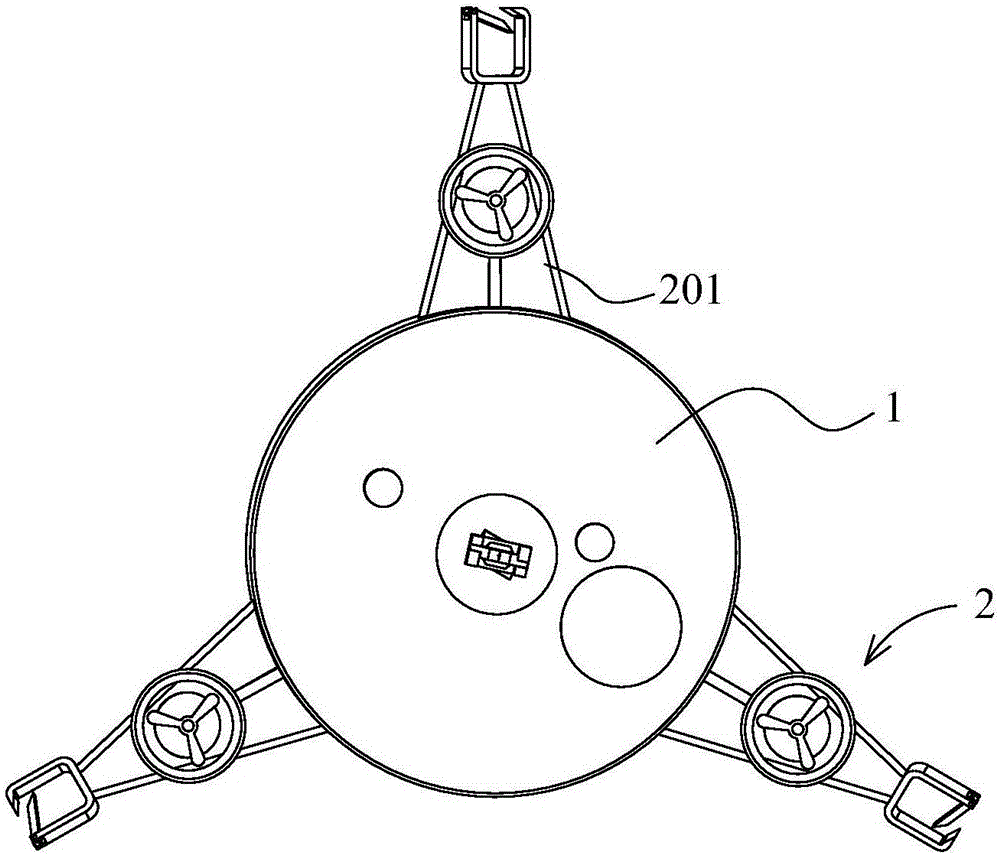
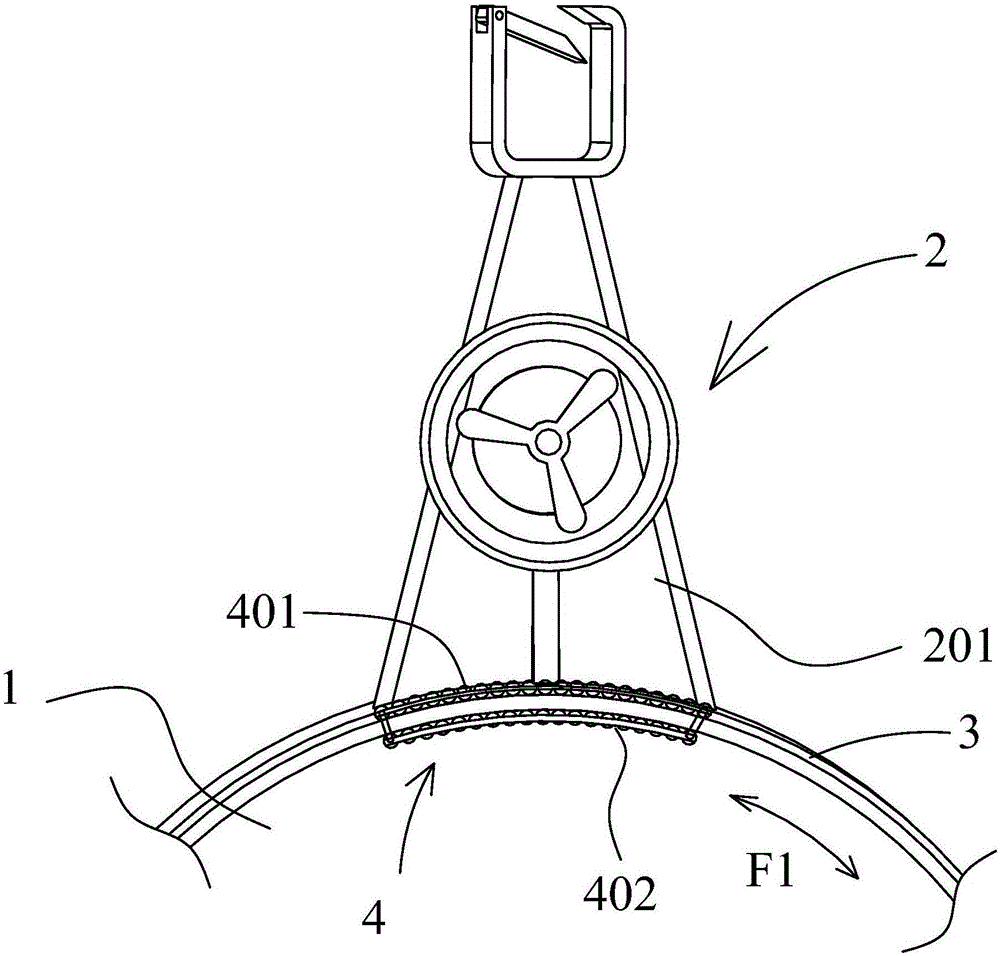
[0031] The main body 1 is shuttle-shaped; the power unit includes three propeller-type motor propellers, which are distributed on the outer wall at 120°; the processor module is suitable for controlling the three propeller-type motor propellers to work together to control water The underwater robot travels underwater.
[0032] Specifically, the underwater traveling mode of the underwater robot includes but is not limited to ups and dow...
Embodiment 2
[0049] Such as Figure 6 to Figure 8 As shown, Embodiment 2 also provides an underwater robot swarm cooperative search and rescue system, including at least two underwater robots as described in Embodiment 1, and a server for coordinating the work of each robot.
[0050] Each underwater robot is suitable for carrying out search activities in their respective activity areas. When one of the underwater robots finds the target, it sends the target position to the server, and the server notifies each underwater robot; The current position of the robot (for example Figure 6 A and B in A) and the target position to determine a converging point (such as Figure 6 Middle y), that is, the server notifies each underwater robot to travel to the meeting point for rendezvous, and queues to the target location (such as Figure 6 shown by x). Where the confluence path is as Figure 6 As shown by the dotted line in the center, the path from the gathering point y to the target point x is ...
Embodiment 3
[0055] On the basis of Embodiments 1 and 2, Embodiment 3 provides a working method of an underwater robot swarm cooperative search and rescue system.
[0056] Wherein the underwater robot swarm cooperative search and rescue system is as described in Embodiment 2, and the working process of the underwater robot swarm cooperative search and rescue system has been discussed in Embodiment 2, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More