

Four-rotor aircraft attitude control method and system based on sliding-mode control law and ESO
A quadrotor aircraft, attitude control technology, applied in attitude control, control/adjustment system, non-electric variable control and other directions, can solve problems such as unsatisfactory control effect, and achieve the effect of good tracking performance and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] The present invention will be described in further detail below through specific embodiments and in conjunction with the accompanying drawings.
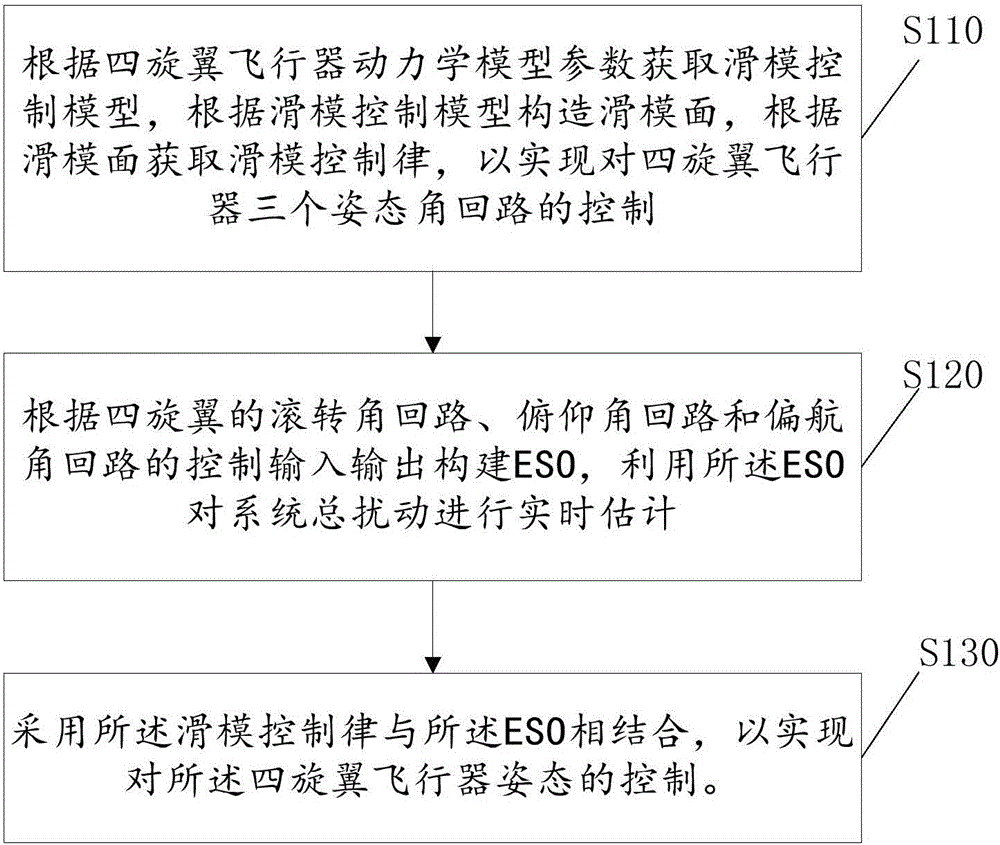
[0116] Such as figure 1 As shown, the present invention provides a kind of quadrotor aircraft attitude control based on sliding mode control law and ESO, comprising:
[0117] S110: Obtain a sliding mode control model according to the parameters of the quadrotor aircraft dynamics model, construct a sliding mode surface according to the sliding mode control model, and obtain a sliding mode control law according to the sliding mode surface, so as to realize the control of the three attitude angle loops of the quadrotor aircraft;
[0118] S120: Establish ESO according to the roll angle, pitch angle or yaw angle of the quadrotor, and use ESO to estimate the total disturbance of the system in real time;
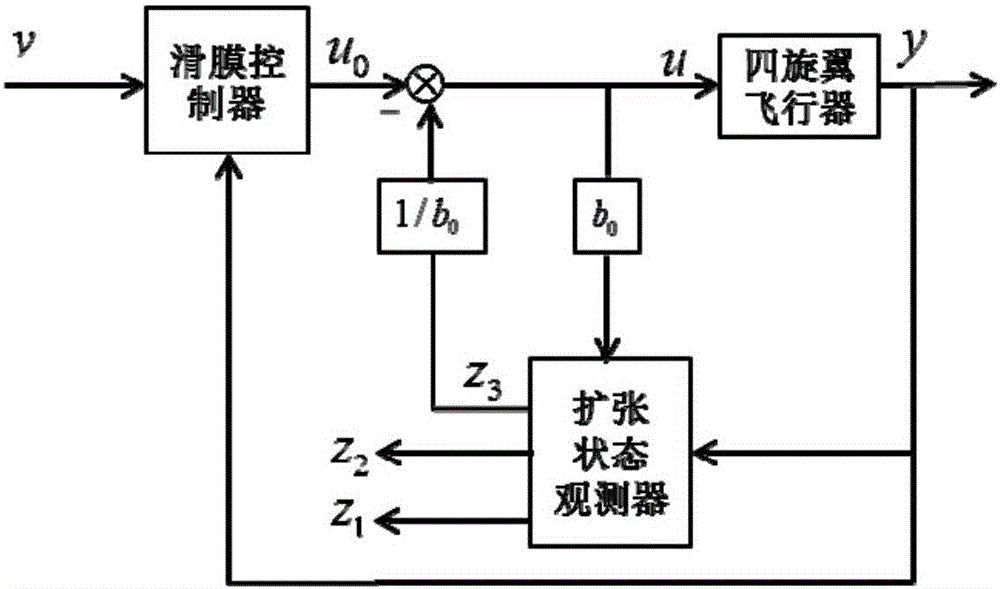
[0119] S130: Combining the sliding mode control model with the ESO to control the attitude of the quadrotor aircraft.
[0120] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More