

A steering gear and a robot
A technology of steering gear and limiter, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve problems such as affecting the stability of the robot, and achieve the effect of improving user experience and avoiding fall damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
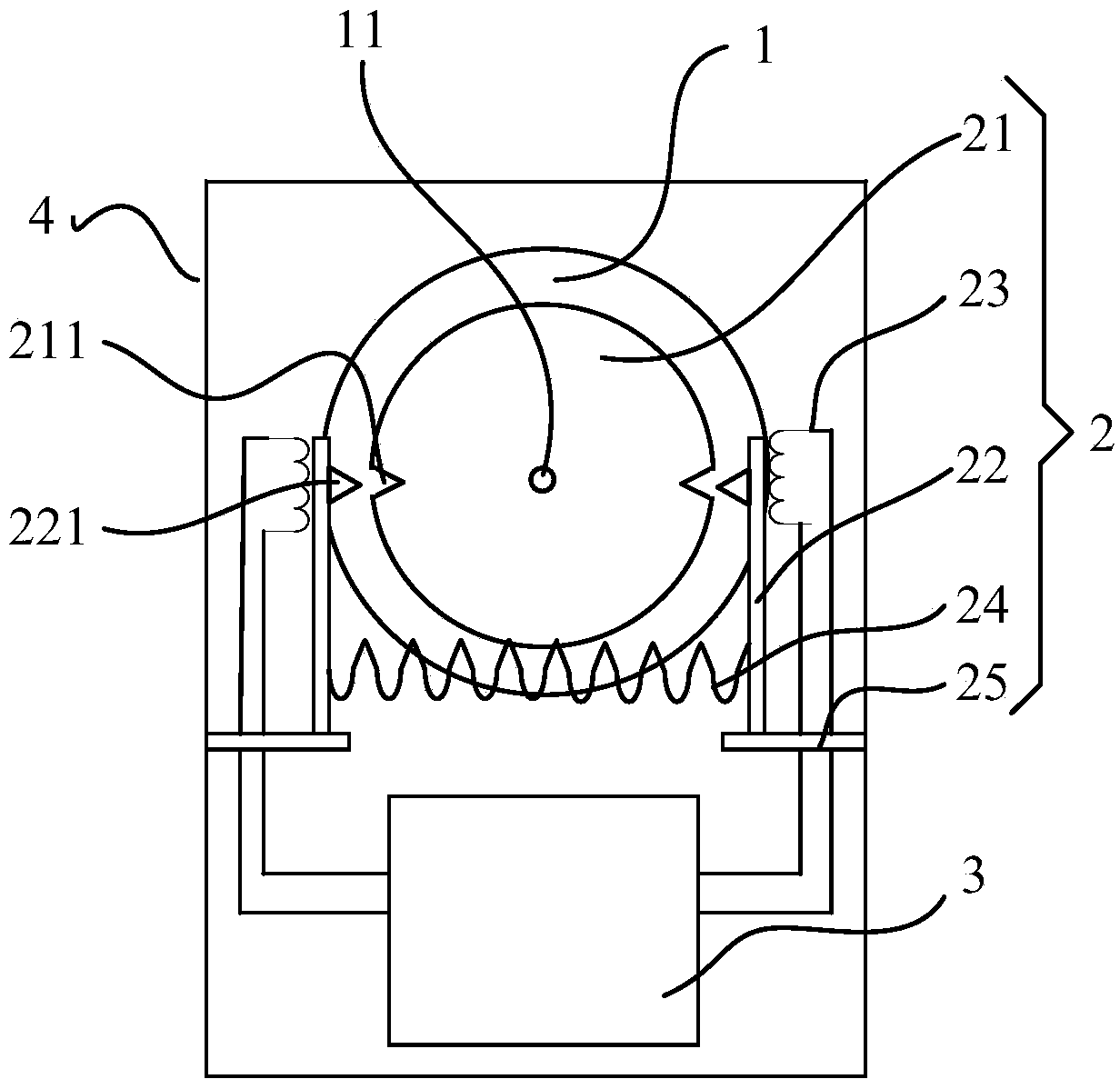
[0034] see Figure 1 ~ Figure 3 As shown, this embodiment provides an implementation of a steering gear, the steering gear includes a motor 1, a reduction gear set (not shown) and a locking structure 2;
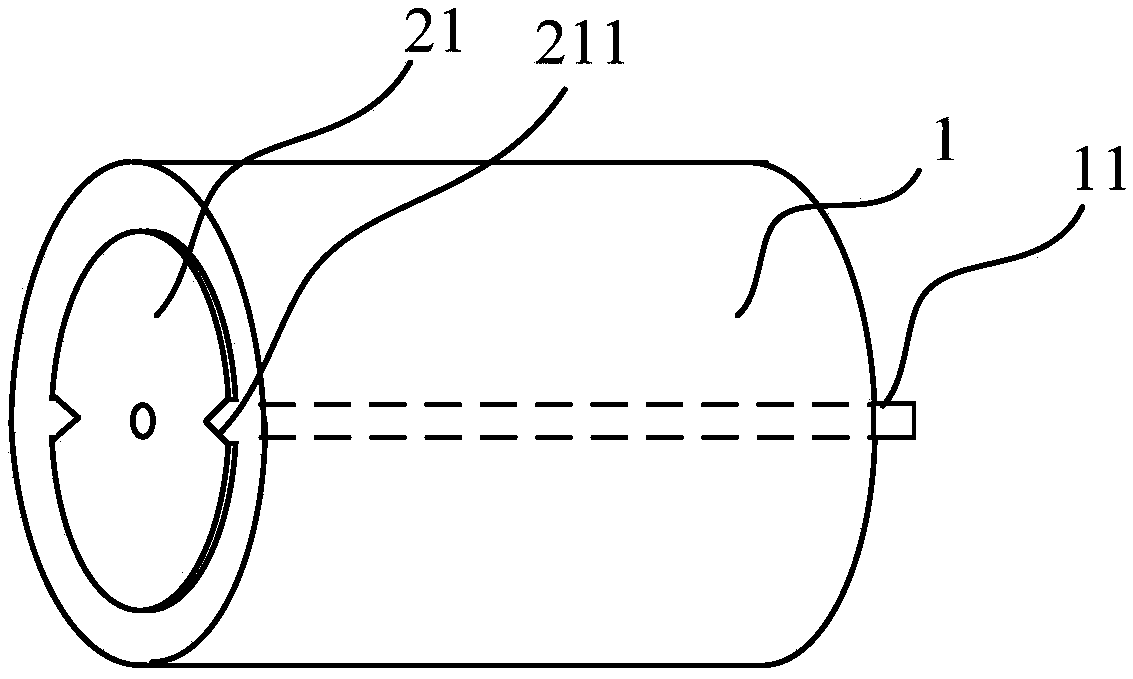
[0035] The motor 1 has a rotating shaft 11, and the reduction gear set is connected to the rotating shaft 11 for the reduction output of the motor 1;
[0036] The locking structure 2 is arranged at the position of the rotating shaft 11, and the locking structure 2 is set in linkage with the motor 1; the locking structure 2 limits the movement of the rotating shaft 11 when the motor 1 is in a power-off state turn;
[0037] The locking structure 2 releases the restriction on the rotation of the rotating shaft 11 when the motor 1 is in the energized state.
[0038] A locking structure 2 is provided on the rotating shaft 11 of the motor 1. Through linkage setting, when the motor 1 rotates, the locking structure 2 releases the locking of the rotating shaft 11. When the motor 1 i...
Embodiment 2
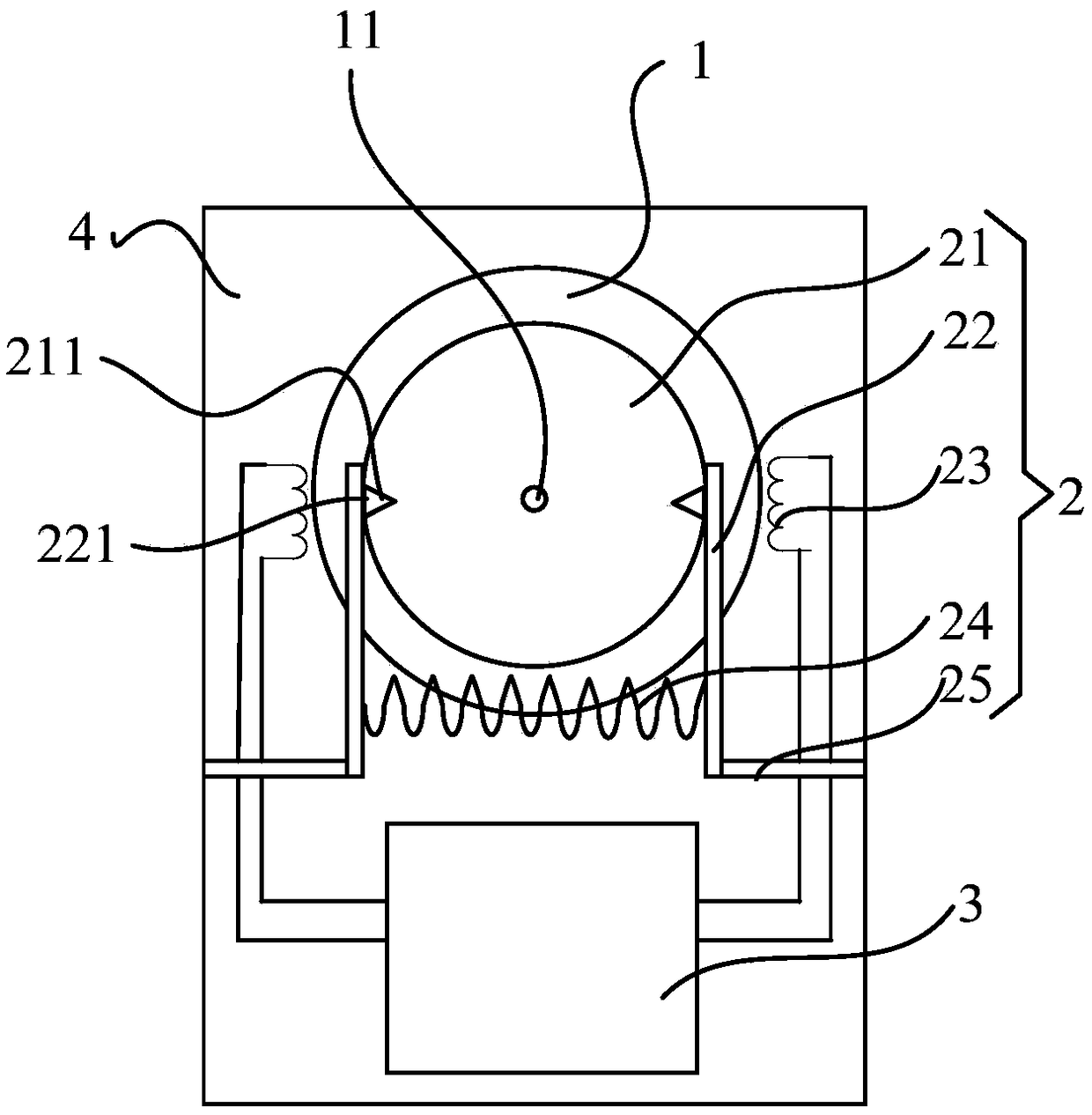
[0058] see Image 6 As shown, this embodiment provides a preferred implementation of the locking structure 2, the locking structure 2 includes a rotating member 21, a limiting member 22 and a coil 23, the center of the rotating member 21 is fixedly connected to the On the rotating shaft 11, the rotating member 21 is provided with a first engaging portion 211, the limiting member 22 is provided with a second engaging portion 221, and the coil 23 is located on the limiting member 22 away from the first engaging portion. On one side of the two engaging parts 221 , and when the steering gear is in a power-off state, there is a displacement gap between the coil 23 and the limiting member 22 .
[0059] In this embodiment, the limiting member 22 is an elastic deformation member, and the elastic deformation member can be made of a ferromagnetic metal material, and the elastic deformation member is in the shape of a curved plate. The end away from the second engaging portion 221 is fi...
Embodiment 3
[0061] see Figure 7 As shown, this embodiment provides a preferred implementation of the locking structure 2, the locking structure 2 includes a rotating member 21, a limiting member 22 and a coil 23, the center of the rotating member 21 is fixedly connected to the On the rotating shaft 11, the rotating member 21 is provided with a first engaging portion 211, and the limiting member 22 is provided with a second engaging portion 221. The limiting member 22 is at least partially made of ferromagnetic material. The coil 23 is located on a side of the limiting member 22 away from the second engaging portion 221 , and when the steering gear is in a power-off state, there is a displacement gap between the coil 23 and the limiting member 22 .
[0062] In this embodiment, the locking structure 2 further includes a support member 26, the support member 26 is fixed on the casing of the motor 1 or the steering gear housing 4, and the limiting member 22 is far away from the first One en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More