

Gripper for mobile robot, robot arm and mobile robot
A mobile robot and gripper technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of inability to open or close door handles, difficulty in robot control, and damage to door handles, etc., to achieve simple structure and practicability Strong and full use of resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
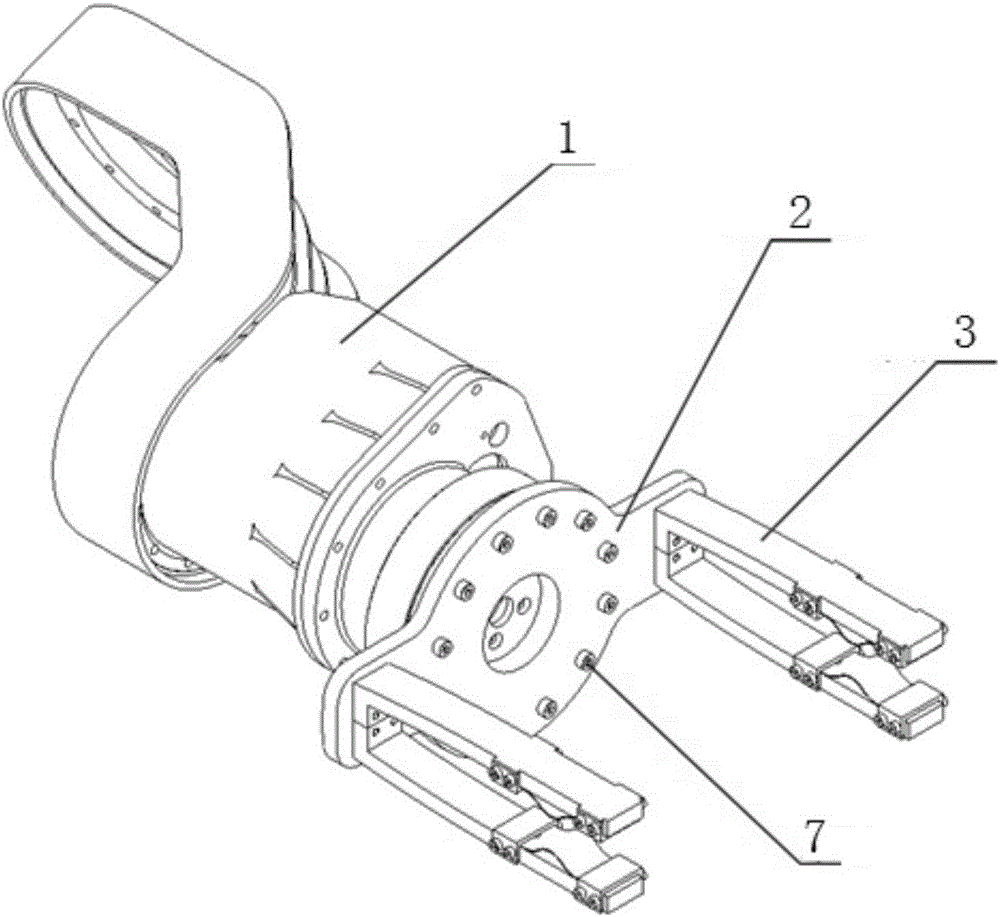
[0055] Grippers for mobile robots, such as figure 1 , shown in Fig. 8, paw is grasped combination 3 by manipulator and controls door handle 13, then rotates by mechanical arm 1 terminal motor, opens, closes door handle, realizes the purpose of operating electric cabinet door.
[0056] Specifically, a connecting flange 2 is installed on the motor at the end of the mechanical arm 1 through screws, and two sets of hand grasping assemblies 3 are fixed on the connecting flange 2 through first screws 7 .
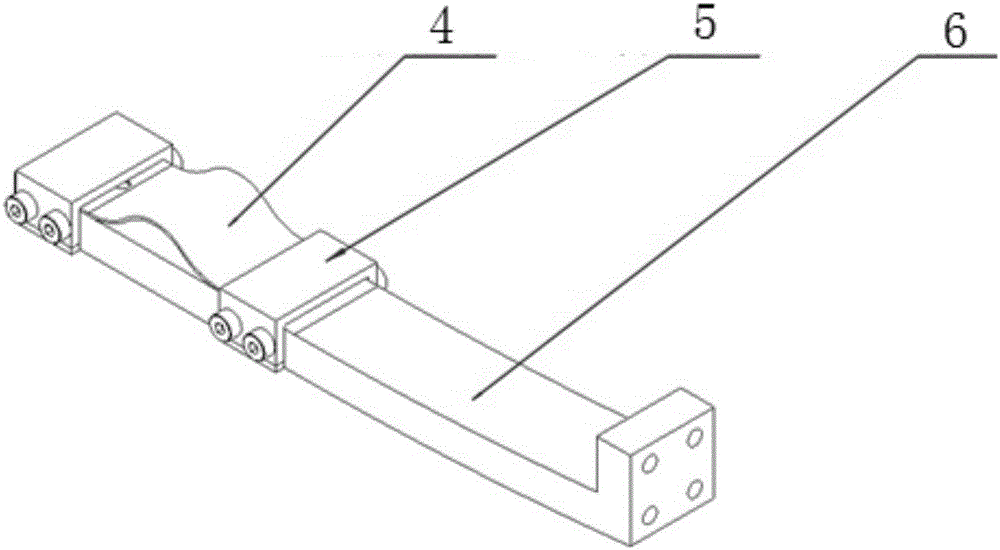
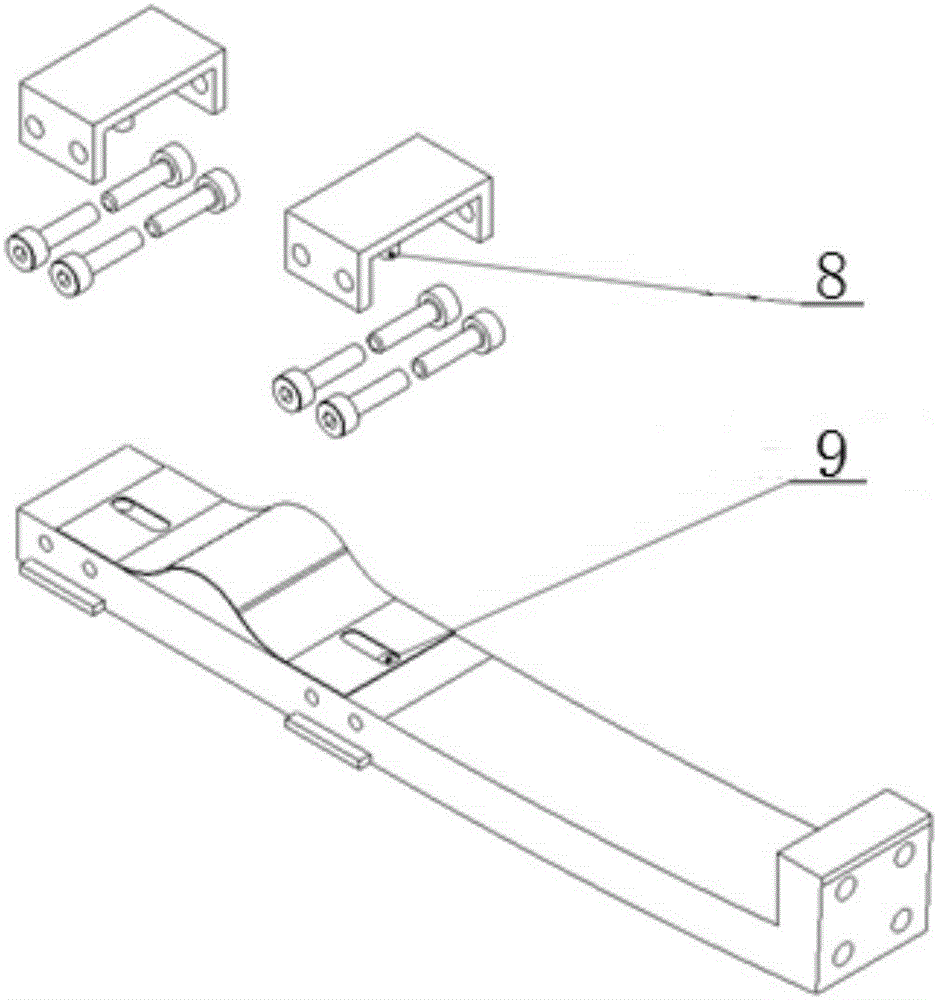
[0057] The gripper assembly 3 includes two mechanical fingers 6 respectively. The mechanical fingers 6 are symmetrically installed in pairs and facing each other. The mechanical fingers 6 are basically L-shaped. There are two threaded holes on one side, and only the nearest set of threaded holes is installed when fixing, and the second screw 11 is used to realize the fixing of the mechanical finger 6 and the connecting flange 2, such as Figure 5 As shown, there is an adjustment ...
Embodiment 2
[0067] The difference between this embodiment and embodiment 1 is:
[0068] In this embodiment, there is no adjustment gap between the mechanical fingers and the connecting flange. In this case, the entire mechanical gripper is only suitable for opening door handles or valves with a specific width range.
Embodiment 3
[0070] The gripper for mobile robots includes mechanical fingers that can move door handles or valve handles or valve handwheels driven by the rotation of the mechanical arm of the mobile robot.
[0071] In order to prevent the handle or valve from being separated from the mechanical finger during the rotation process, the surface of the mechanical finger in contact with the door handle or valve handle or valve hand wheel is provided with a protrusion for limiting the position of the door handle or valve handle or valve hand wheel .
[0072] When the above-mentioned mechanical finger is placed on the side of the door handle or valve handle, or on the side of the valve hand wheel rib, the rotation of the robot arm drives the mechanical finger to rotate to open the door handle or valve. When the mechanical finger When placed on the other side of the door panel or valve, the mechanical arm drives the mechanical finger to rotate in the opposite direction to close the door handle o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More