

Automatic track generating method for unmanned aerial vehicle
A drone and track technology, applied in the field of drones, can solve the problems of material leakage, difficult to guarantee operation accuracy, and battery waste.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
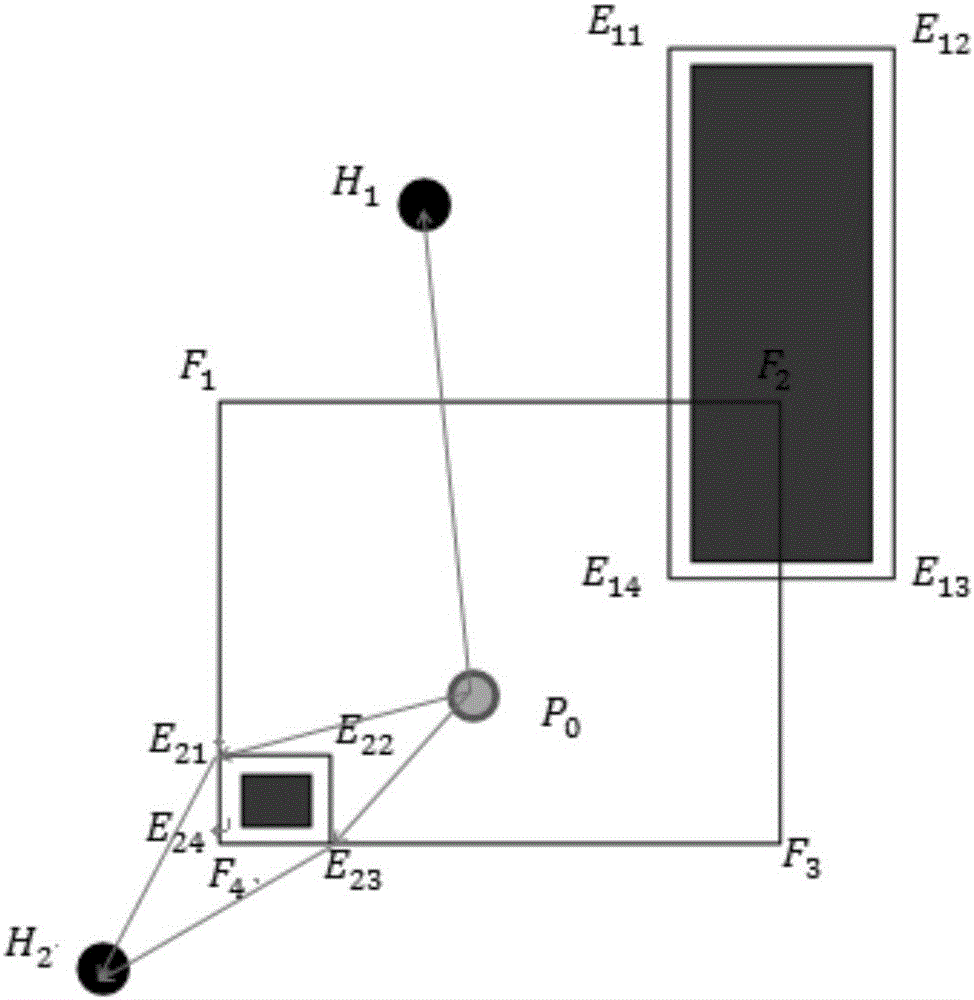
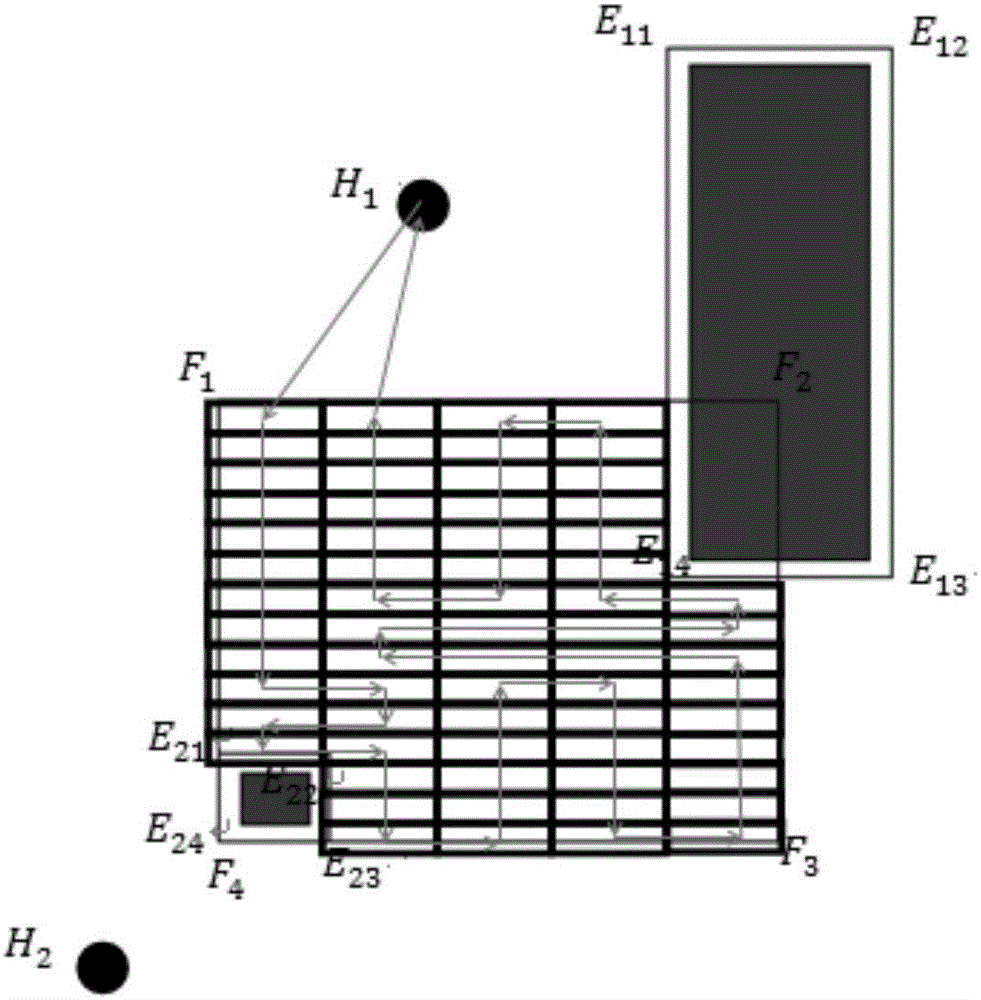
[0048] Combine below Figure 1-Figure 3 The technical solutions of the present invention are further described through specific implementation methods.
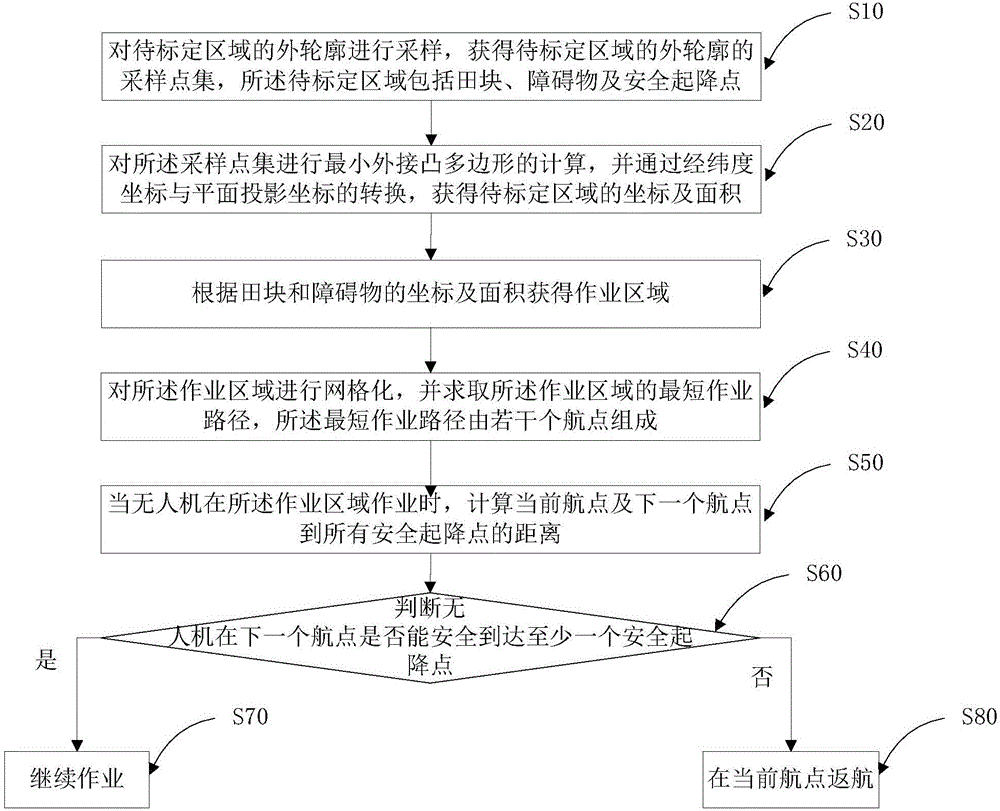
[0049] figure 1 It is a flow chart of a UAV automatic track generation method provided in this embodiment.
[0050] A method for generating an automatic track of an unmanned aerial vehicle, comprising:
[0051] S10. Sampling the outer contour of the area to be calibrated to obtain a sampling point set of the outer contour of the area to be calibrated, the area to be calibrated includes fields, obstacles, and safe take-off and landing points;
[0052] S20. Calculating the smallest circumscribed convex polygon on the sampling point set, and obtaining the coordinates and area of the area to be calibrated by converting the latitude and longitude coordinates and the plane projection coordinates;
[0053] S30. Obtain the operation area according to the coordinates and areas of the fields and obstacles;
[0054] S40. Perform gri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More