

Unmanned aerial vehicle system and method for dynamically positioning ground moving target
A technology for moving targets and unmanned aerial vehicles, which is applied in the field of UAV systems for dynamic positioning of ground moving targets, and can solve problems such as difficult engineering implementation, inability to realize dynamic positioning and target behavior prediction, and low calculation accuracy of fixed target positions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
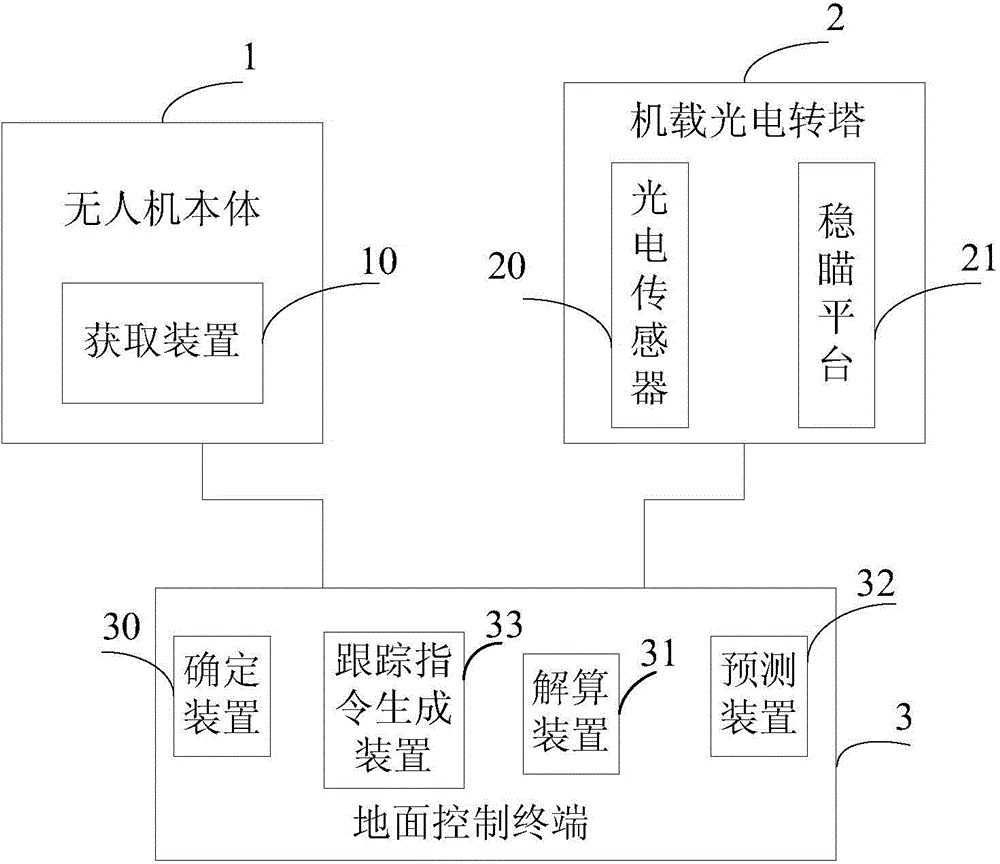
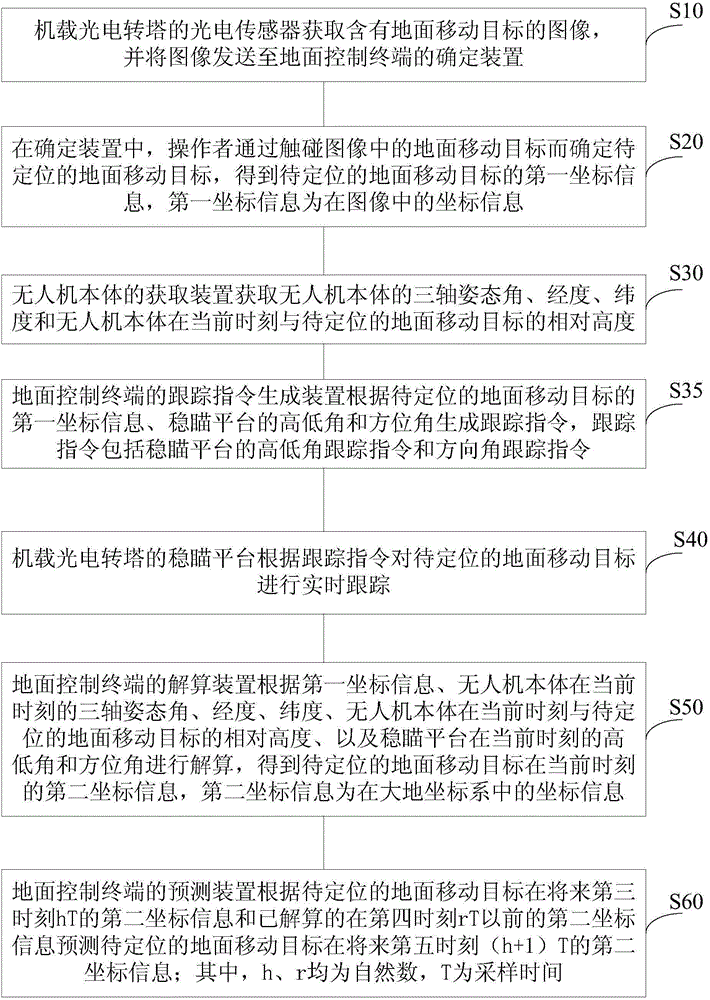
[0053] see figure 2 , the embodiment of the present invention provides an unmanned aerial vehicle system for dynamic positioning of ground moving targets. Carrying a photoelectric turret 2 , a ground control terminal 3 with a determining device 30 , a tracking instruction generating device 33 , a calculating device 31 and a predicting device 32 .
[0054] Wherein, the obtaining device 10 is used to obtain the three-axis attitude angle, longitude, and latitude of the UAV body and the relative height between the UAV body and the ground moving target to be positioned. In practice, the three-axis attitude angle of the UAV body is obtained by the three-axis attitude sensor of the UAV body; the longitude and latitude of the UAV body are ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More