

Redundancy dual-mechanical-arm multi-index coordinate exercise planning method
A dual-arm, coordinated motion technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as not being able to meet the needs in specific situations, and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings.
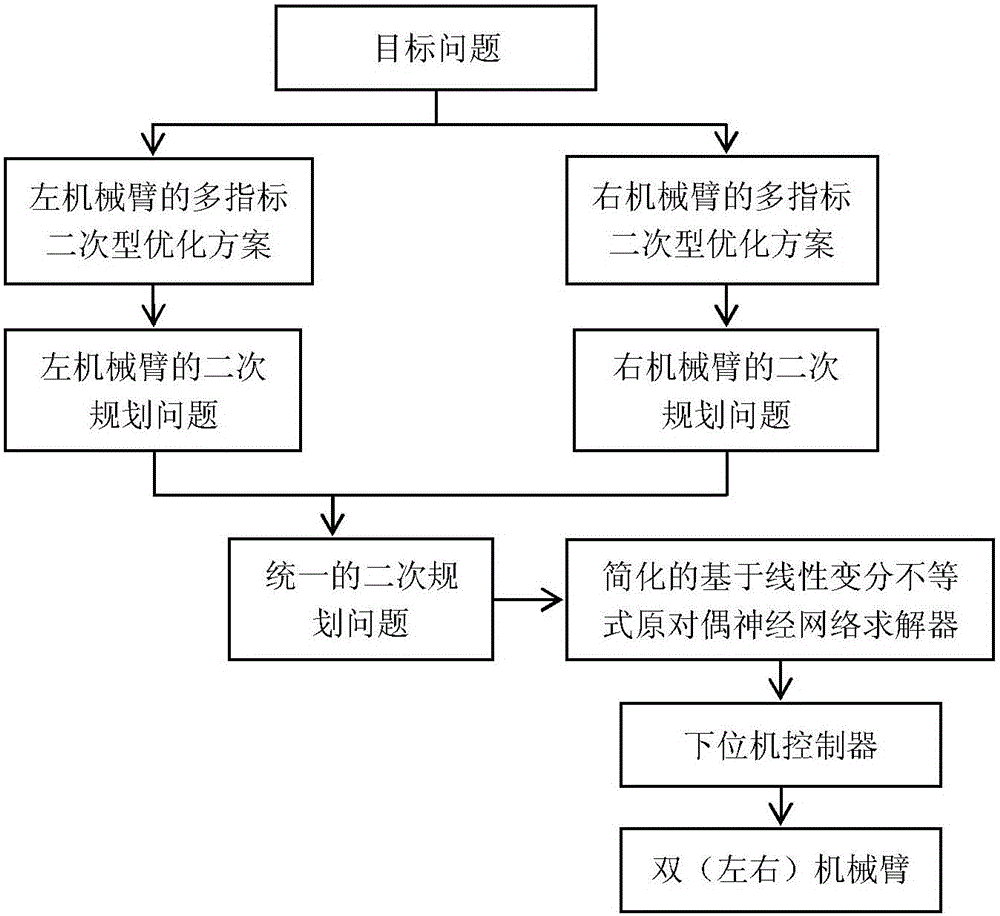
[0017] figure 1 The shown redundant dual manipulator multi-index coordinated motion planning method mainly consists of the target problem, the multi-index quadratic optimization scheme of the left manipulator, the multi-index quadratic optimization scheme of the right manipulator, and the quadratic optimization scheme of the left manipulator. The programming problem and the quadratic programming problem of the right manipulator, the unified quadratic programming problem, the simplified linear variational inequality-based primal dual neural network solver, the lower computer controller and the dual (left and right) manipulators.
[0018] Firstly, based on the objective problem, a quadratic optimization scheme is adopted, and the respective inverse kinematics solutions of the left and right manipulators are designed to minimize with in subject to subject to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More