

Negative pressure adsorption wall-climbing robot and its system
A wall-climbing robot and adsorption technology, applied in the field of robotics and automation, can solve problems such as limitations in the scope of use and the use of the environment, difficulty in expansion and subsequent upgrades, limitations in obstacle-crossing capabilities, etc., to achieve long continuous working hours and improved obstacle-crossing Capabilities, Complexity Reduction Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
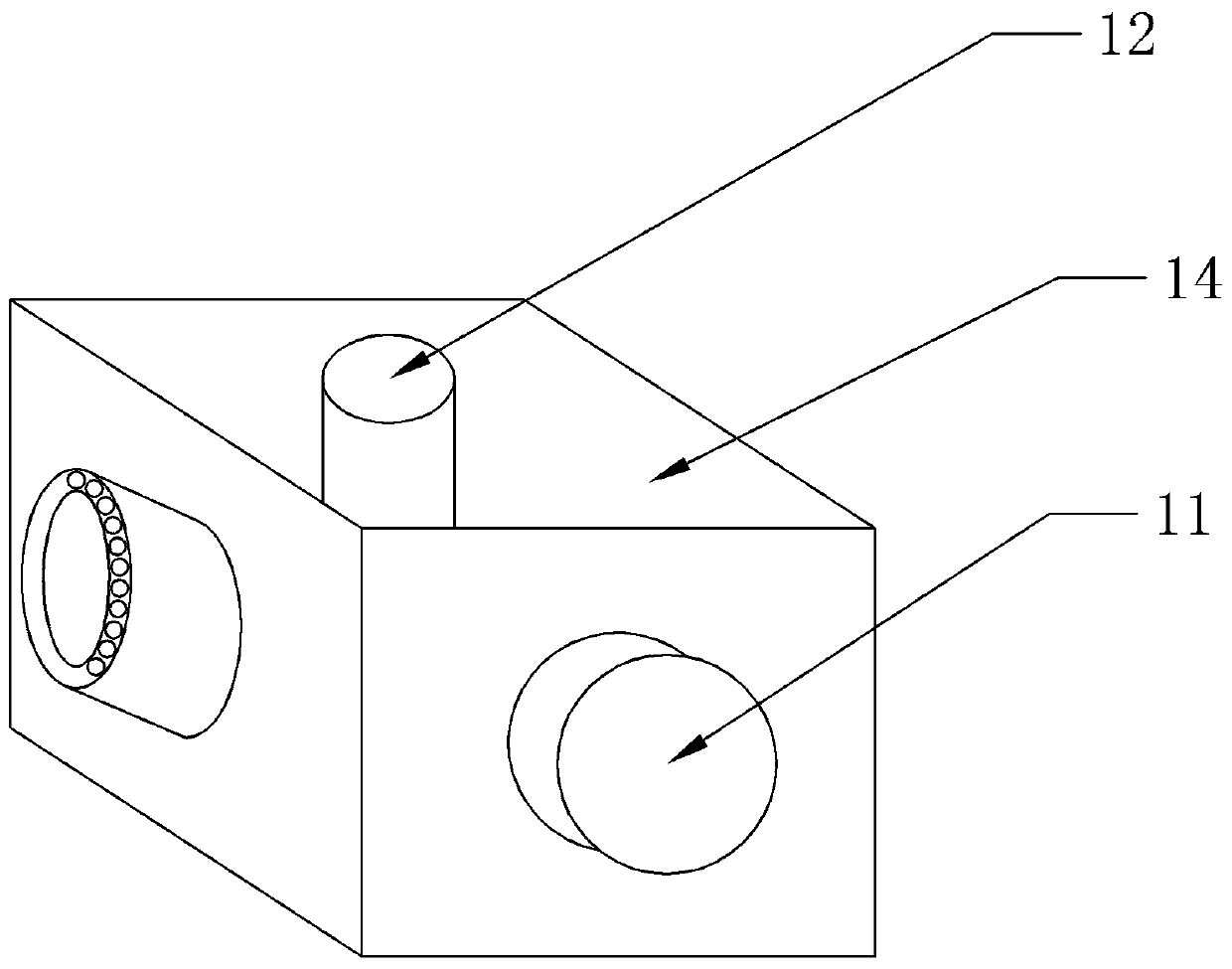
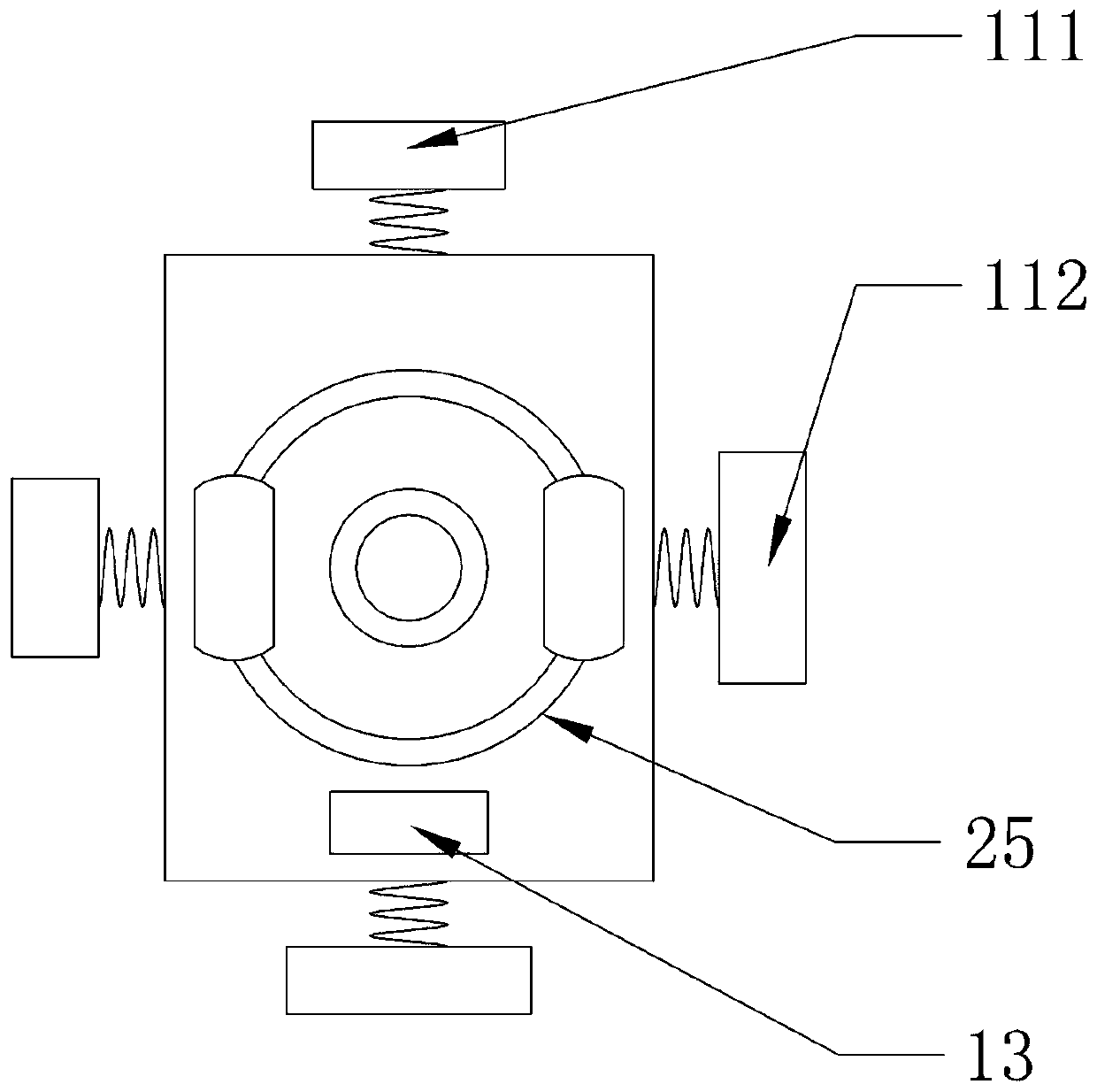
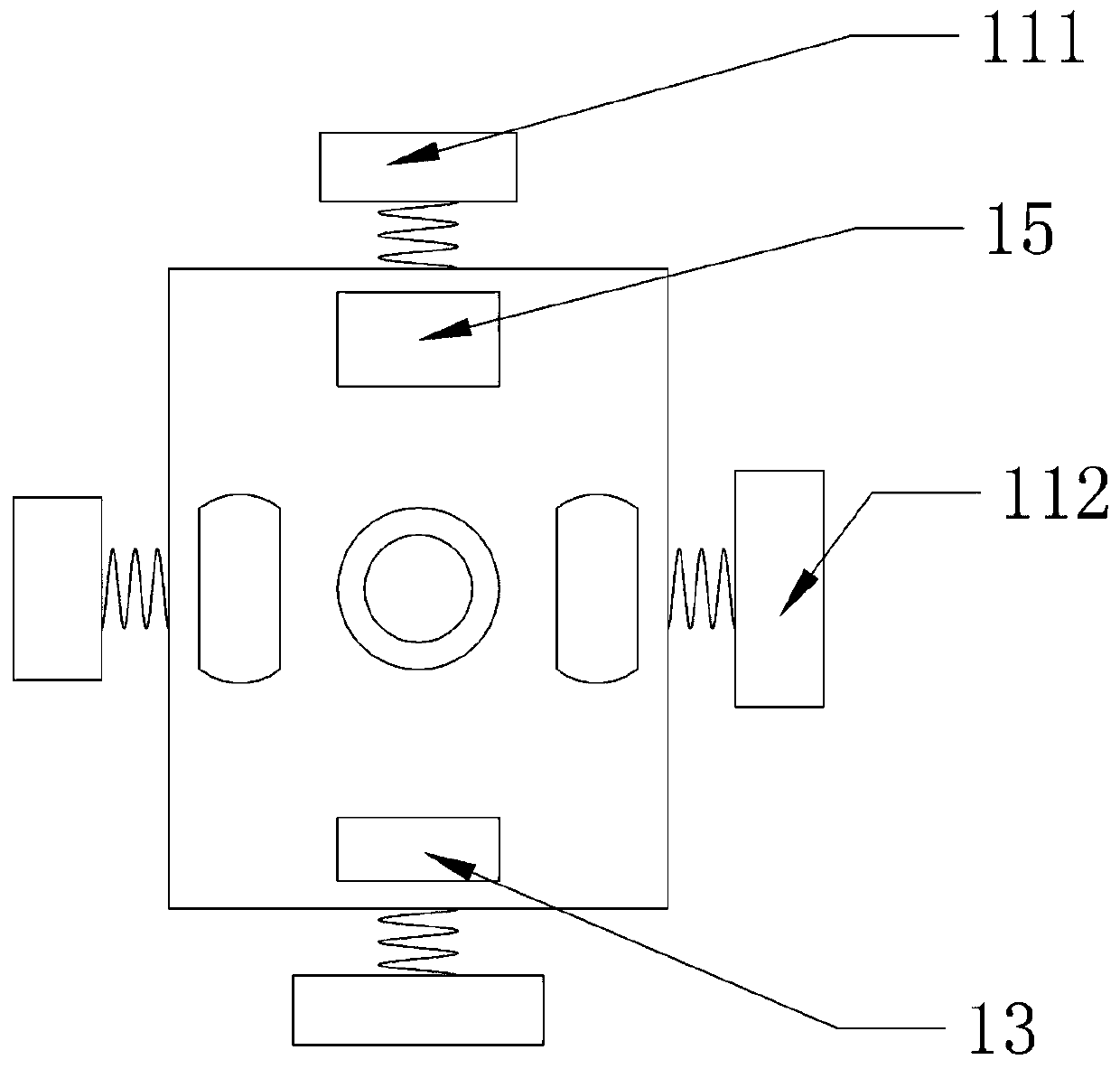
[0038] Embodiment 1, the modular robot designed by the present invention includes the following basic parts: support and sealing device 14, convex connector 111, concave connector 112, negative pressure generating device 12, control device 13, power moving device 15; At the same time, the modular robot of the present invention is divided into two types: dynamic negative pressure adsorption type and non-powered negative pressure adsorption type. The dynamic negative pressure adsorption type robot also has a drive motor, and the robot without self-propelled power also has a universal ring. Refer to Figure 1 to Figure 5 .
Embodiment 2
[0039] Embodiment 2, the moving wheel of the wall-climbing robot of the present invention is glued with a rubber friction belt with anti-skid effect. For walls made of materials such as paint, masonry or cement, it has the function of self-help realization of wall-climbing attitude conversion. Refer to Figure 1 to Figure 5 , and the rest are the same as the above-mentioned embodiment.
Embodiment 3
[0040] Embodiment 3, the control device 13 of the present invention includes components such as a radio station, an information control board, and a battery, and can receive instructions from the remote control device through the radio station. The negative pressure generating device 12 includes an impeller, a pump body, a pump driving motor seat, a motor driving top wire, a guide ring, and a pressure regulating valve. The pump body is fixed on the support base plate of the robot, and the pump driving motor seat is fixed on the pump body. The motor output shaft fixed on the pump driving motor seat goes deep into the characteristic hole of the impeller, and then the motor output shaft installed in the threaded hole is used to The top wire of the motor drive is fastened to drive the impeller to rotate; a guide ring for rectification is set between the impeller and the motor support; two "L"-shaped labyrinths are used between the impeller and the pump body in the negative pressure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More