

High-precision modeling method for Lorentz force of large-gap electromagnetic actuator
An electromagnetic actuator and Lorentz force high technology, applied in the field of high-precision modeling of Lorentz force for large-gap electromagnetic actuators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0090] The specific steps of the high-precision Lorentz force modeling method for a large-gap electromagnetic actuator provided by the embodiment of the present invention are as follows:
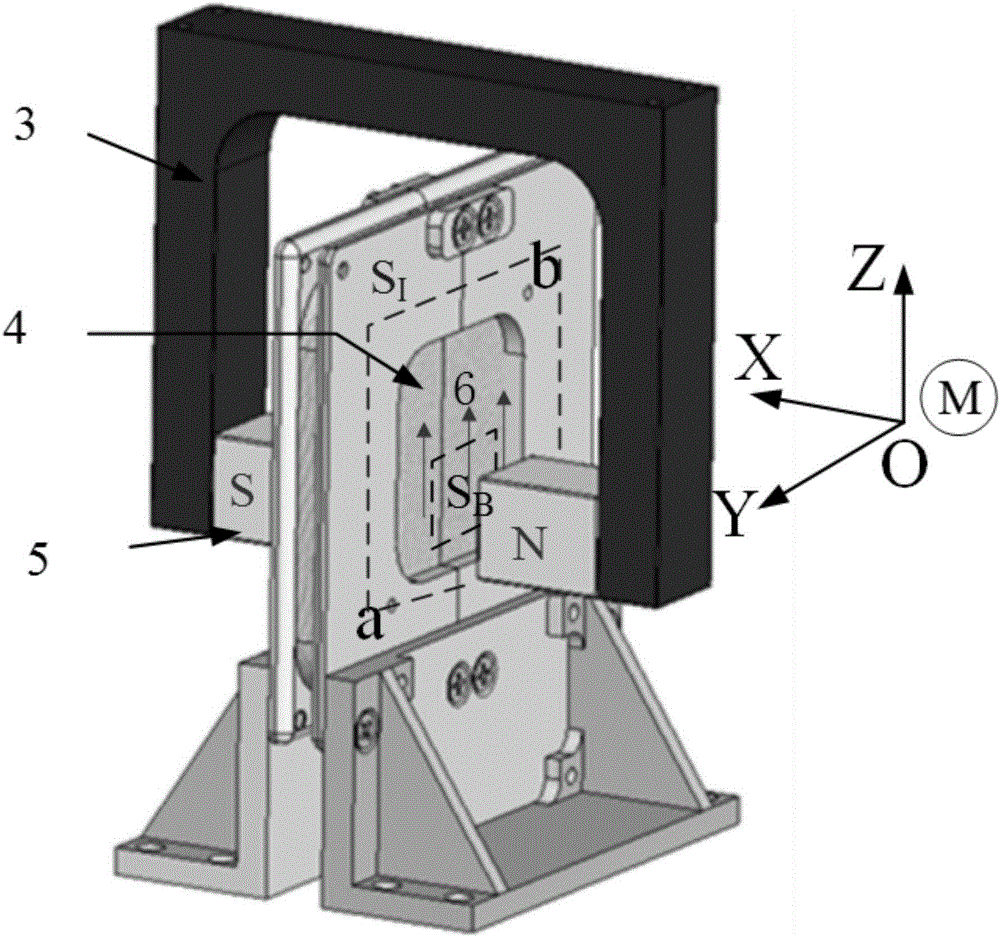
[0091] Step 1: Define the electromagnetic actuator coordinate system, referred to as department, such as figure 2 shown. The coordinate origin O is the midpoint of the line connecting the centers of the N and S poles of the permanent magnet, the X-axis is the line connecting the centers of the N and S poles of the permanent magnet and points from the N pole to the S pole, the Z axis points to the positive direction of the current, and the Y axis is vertical On the X-axis and Z-axis, a right-handed coordinate system is formed.
[0092] The magnetic field distribution of the large-gap electromagnetic actuator is uneven, and the equivalent magnetic field strength of the electromagnetic actuator is tested and calibrated by the static thrust measurement experiment method. When the permanent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More