

Alignment method with combination of strap-down inertial navigation and tachometer based on reverse navigation algorithm
A strapdown inertial navigation and navigation algorithm technology, applied in the field of inertial navigation alignment, can solve the problems of expensive DVL, inability to guarantee measurement accuracy, exposure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
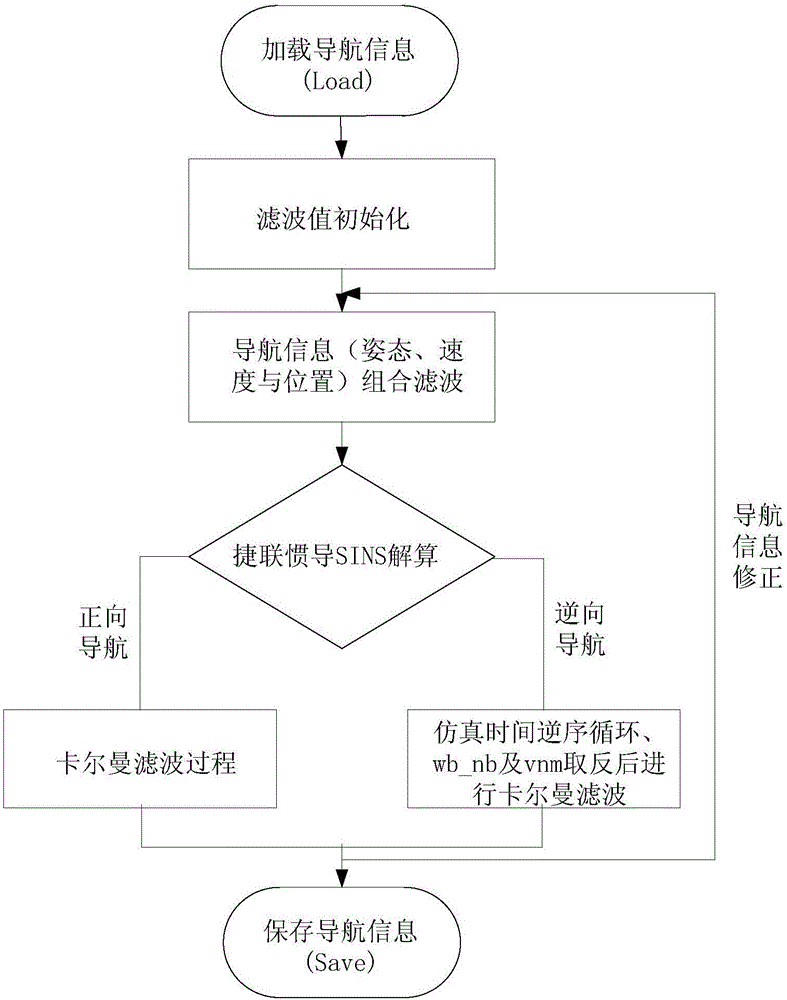
[0102] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0103] Step 1: Build the SINS and tachometer alignment model:
[0104] Transition equation:
[0105] Observation equation: Z ST =H ST x ST +v ST
[0106] In the above formula
[0107]
[0108]
[0109]
[0110]
[0111]
[0112]
[0113] Among them, F ST is the system state matrix, H ST is the system measurement matrix, the system noise w ST and measurement noise μ ST It is white Gaussian noise with zero mean. V N , V U , V E is the speed of the carrier in the north sky direction, λ, L and h represent the longitude, latitude and height of the carrier respectively, and the height information can be directly measured by the depth sensor.
[0114] Establish the differential equation of the forward navigation algorithm and discretize it:
[0115] Attitude equation:
[0116] Velocity equation:
[0117] Position equation:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More