

Active interaction method and system for intelligent robot
A technology of intelligent robot and active interaction, applied in the field of intelligent robot, it can solve the problem of incapability of active interaction between human and machine, and achieve the effect of flexible interaction and high degree of humanization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
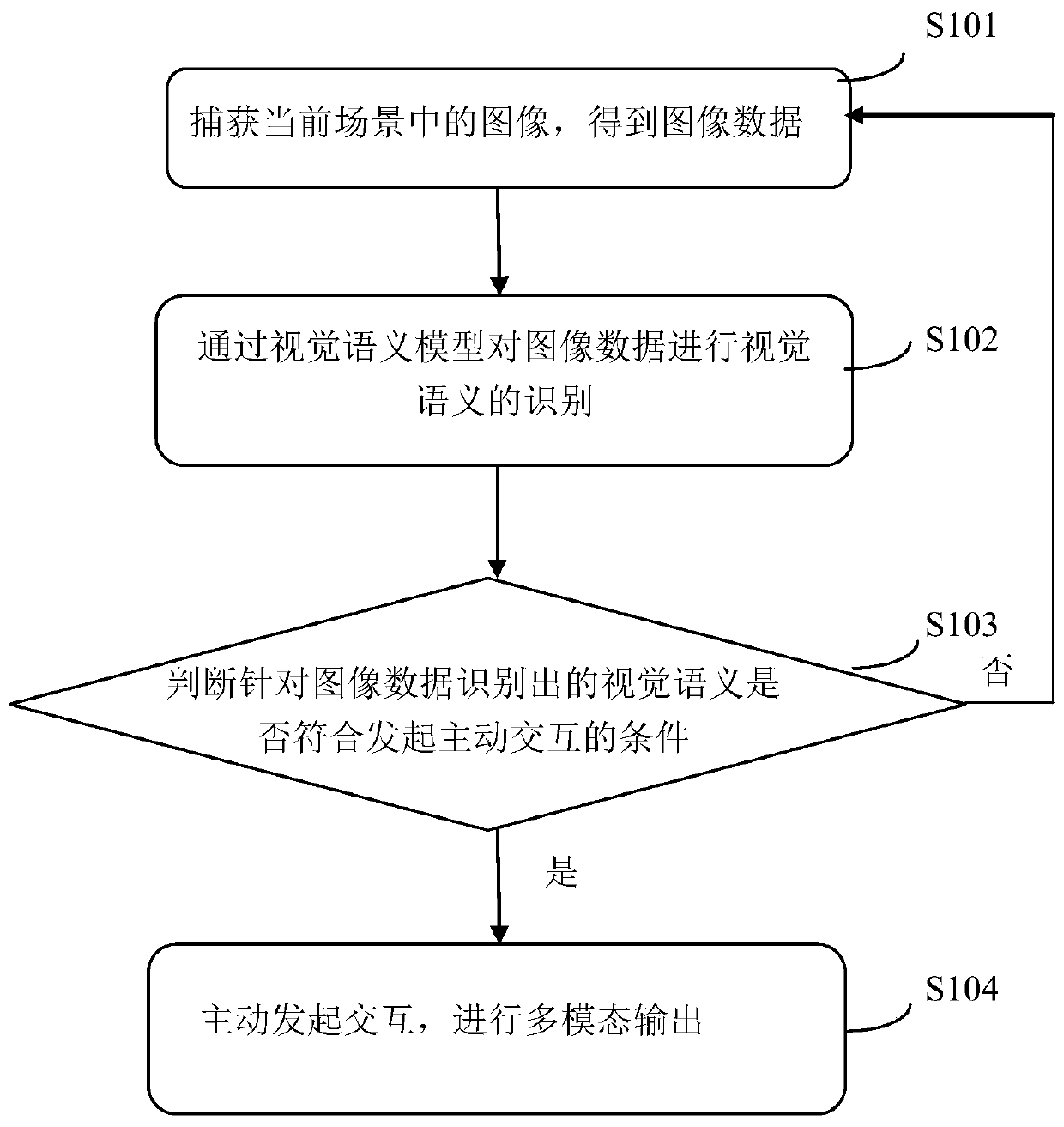
[0034] like figure 1 , which shows a flow chart of an active interaction method for intelligent robots according to an embodiment of the present invention. The active interaction method according to the present invention starts at step S101. In step S101, an image capture operation is performed. Specifically, the intelligent robot can capture images in the current scene, and obtain corresponding image data through image processing. For example, the image data includes information such as the current user's posture, expression, and the environment around the user.
[0035] For the captured current scene image, it can be further classified. For example, for human body images, it is necessary to recognize facial features, expression features, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More