

Remote operated vehicle for subsea pipeline detection
A technology for underwater robots and submarine pipelines, applied to underwater operation equipment, manipulators, program-controlled manipulators, etc., to reduce impact, improve detection efficiency, and improve detection quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with accompanying drawing:
[0050] This kind of submarine pipeline inspection underwater robot includes the body and the hydraulic system and electrical system that provide power and control commands for the body. Its unique features are:
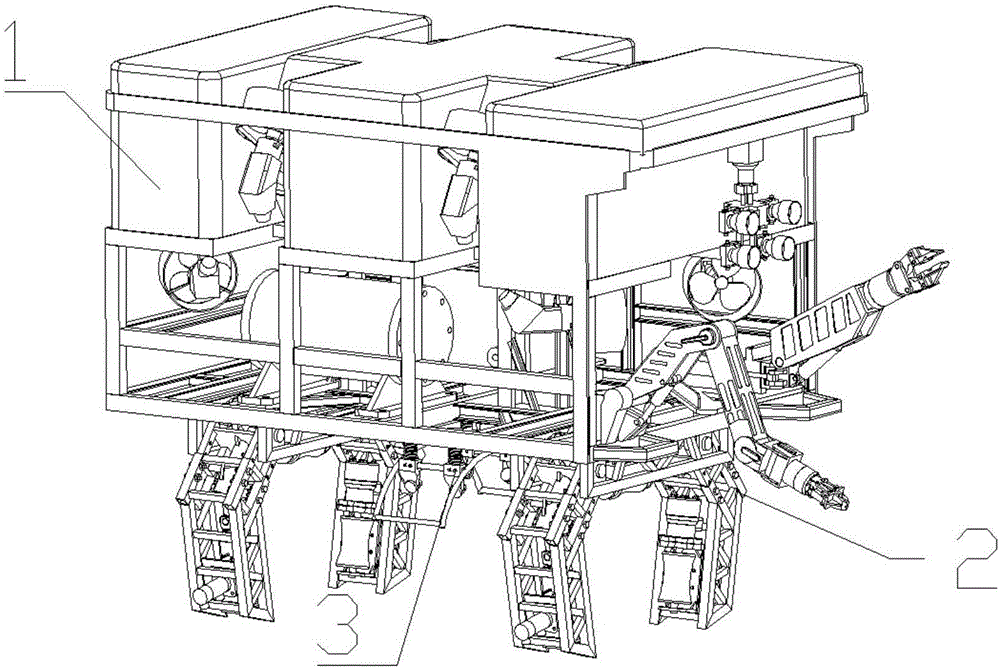
[0051] The body is mainly composed of three parts: ROV body 1 , pipe clamping and traveling device 2 , and detection device 3 .
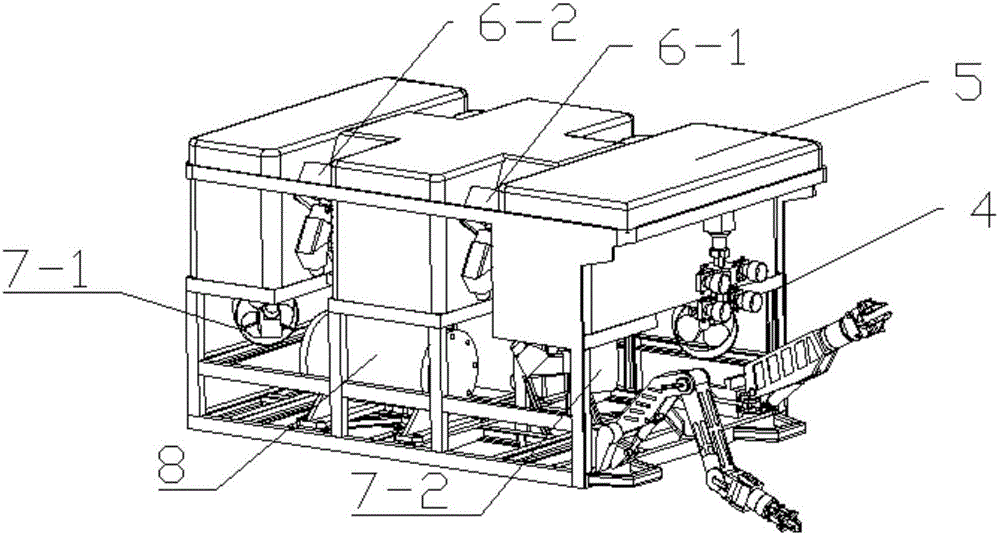
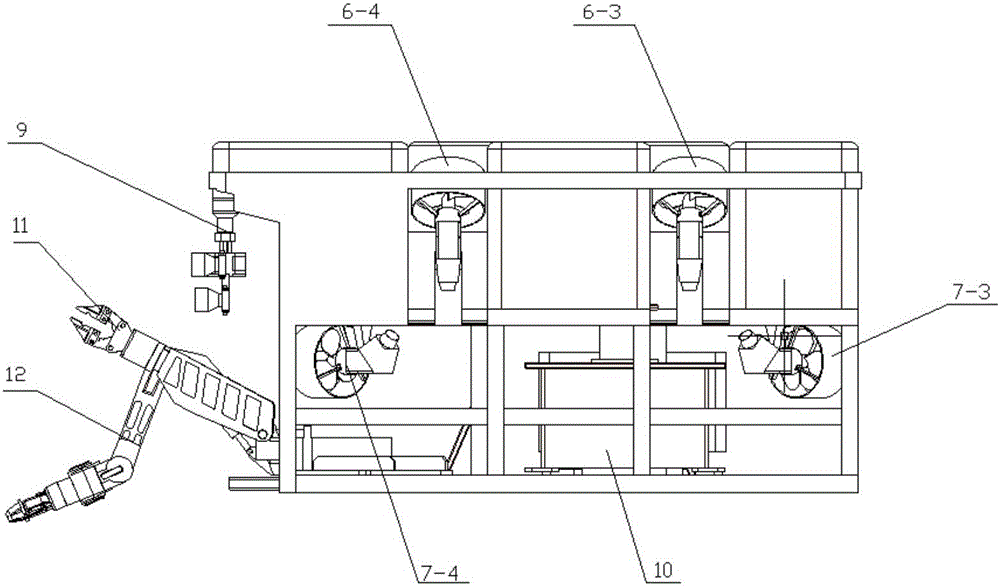
[0052] Wherein, the ROV body 1 is as figure 2 As shown, it mainly consists of a carrier frame 4, a buoyancy module 5, 4 vertical screw propellers 6 and 4 horizontal screw propellers 7, a pressure chamber 8, a cloud platform 9, a hydraulic oil tank 10, and a port side manipulator 11 with 5 degrees of freedom. , A starboard manipulator 12 with 7 degrees of freedom. Among them, the carrier frame is mainly to provide installation positions for other components of the ROV body; the buoyancy module is installed on the top of the carrier fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More