

Improved A* robot optimal path planning method suitable for warehouse environment
An optimal path planning and robotics technology, applied in instruments, data processing applications, two-dimensional position/channel control, etc., can solve problems such as the inability to obtain optimal paths, and achieve easy programming, high real-time performance, and computational complexity. small effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The improved A* robot optimal path planning method applicable to the warehouse environment of the present invention will be further described through simple examples below in conjunction with the accompanying drawings.
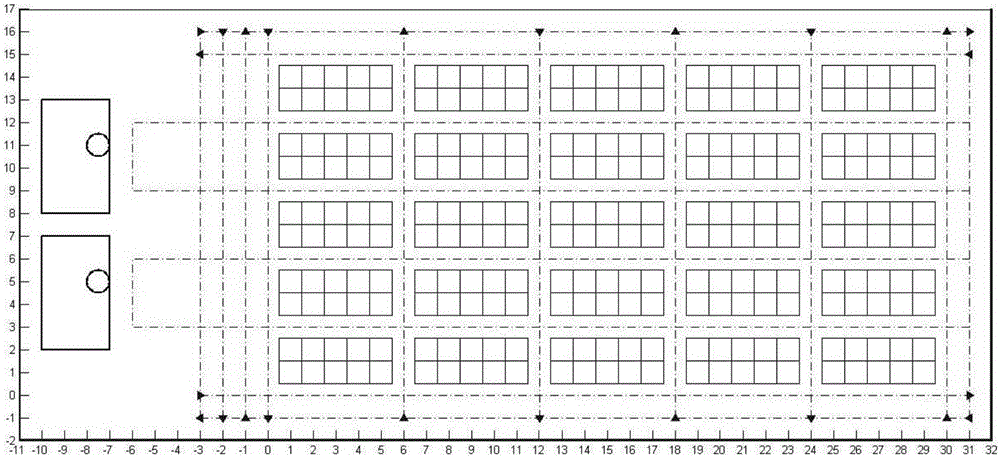
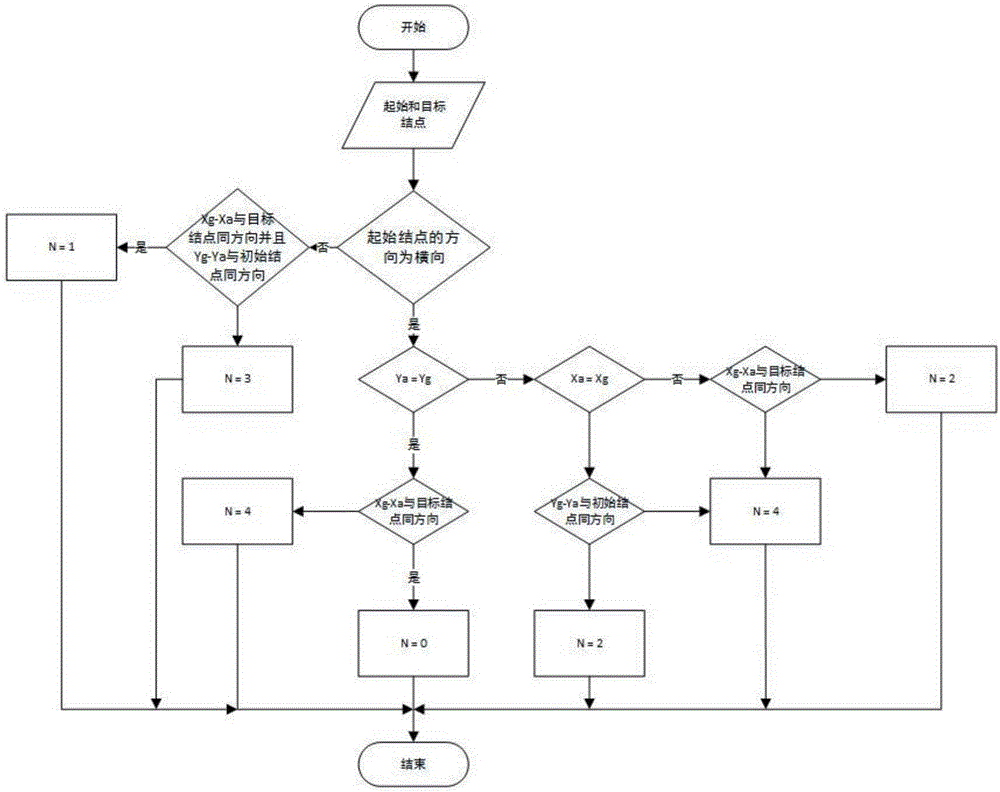
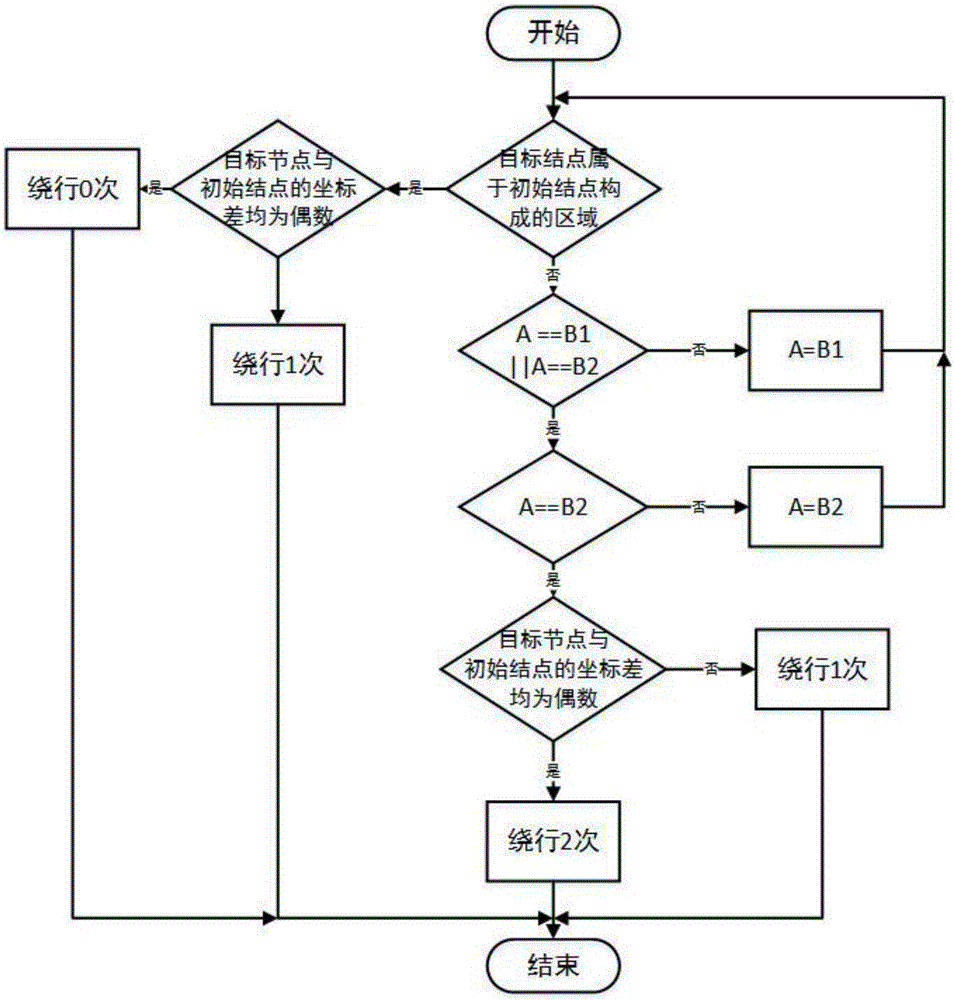
[0022] The improved A* optimal path planning method suitable for the warehouse environment mainly includes the following contents: firstly, an effective and flexible warehouse model is designed, including the design of shelf distribution and road operation rules. The warehouse model is as follows: figure 1 shown. According to the road operation rules in the warehouse model, the path planning problem is simplified to the path planning problem between each node. Then, the improved A* algorithm is used to search for the optimal path between the two nodes. Among them, the calculation of the heuristic function includes the estimation of steering cost, Manhattan distance, and detour distance. The path searched by the improved A* algorithm is a list composed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More