

Force detection method used for substrate
A detection method and technology of strength, applied in the input/output process of data processing, instruments, electrical digital data processing and other directions, can solve the problems of strain resistance occupying a large area, complex wiring, difficult circuit layout, etc. And the effect of easy wiring, reducing the number and improving the accuracy of pressure detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
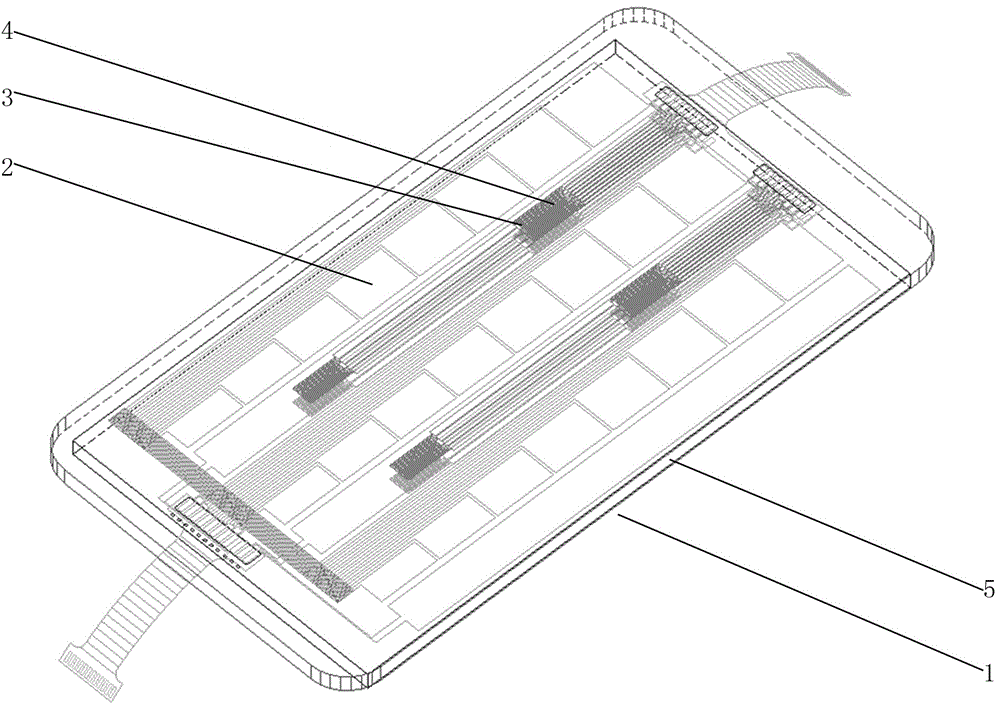
[0023] Such as figure 1 , figure 2 As shown, a force detection method for a substrate is based on a mechanical sensing board 1, the mechanical sensing board 1 includes a touch sensing layer 2 and a mechanical sensing layer 3, the mechanical sensing layer 3 includes a plurality of mechanical sensing units 4, and the mechanical sensing Unit 4 contains multiple strain resistors, including the following steps:
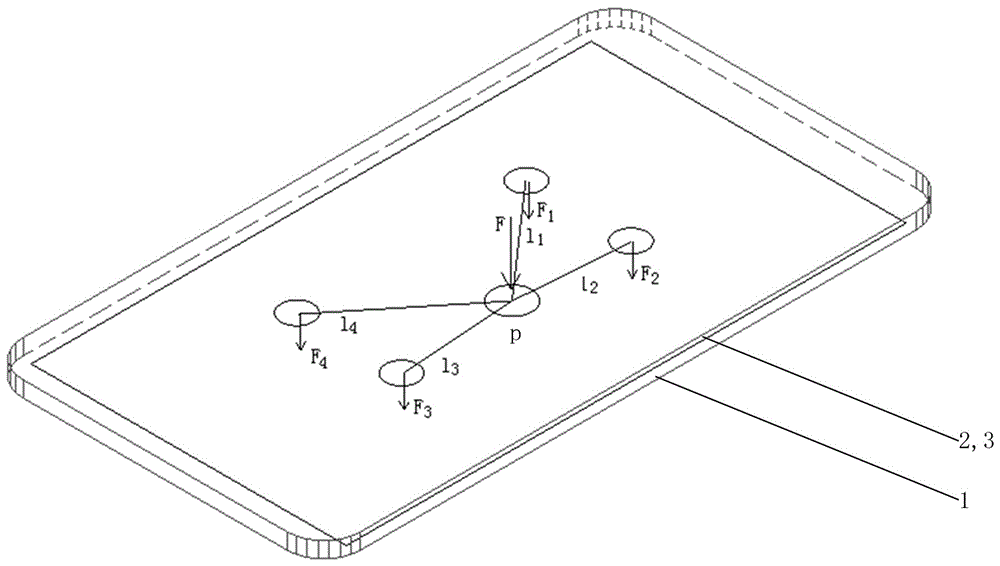
[0024] 1) Detecting the touch position P of the finger on the substrate 5 through the touch sensing layer 2;
[0025] 2) Through the 4 (four) mechanical sensing units 4 near the touch position P on the mechanical sensing layer 3, respectively detect the pressure transmission component f generated by the touch position P 1 , f 2 , f 3 , f 4 ;
[0026] 3) Calculate the distance l between the touch position P and each of the above-mentioned mechanical sensing units 4 1 , l 2 , l 3 , l 4 ;
[0027] 4) According to the pressure transmission component f detected by e...
Embodiment 2
[0030] In the case that other parts are the same as those in Embodiment 1, the only difference is that the calculation method of the pressing force component Fn of the touch position P is different, specifically, in step 4), the pressing force component Fn of the touch position P The specific calculation method is , where k is a lateral force transmission parameter related to the material and thickness of the substrate 5 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More