

Device for obtaining depth image of three-dimensional scene
A 3D scene and depth map technology, applied in the field of scanning and reconstruction of 3D scenes, can solve the problems of parallax and interference between infrared cameras and color cameras
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Embodiments of the present invention describe a device for obtaining a depth map of a three-dimensional scene, which adapts to different application scenarios through state switching and combination of various components in different modes.
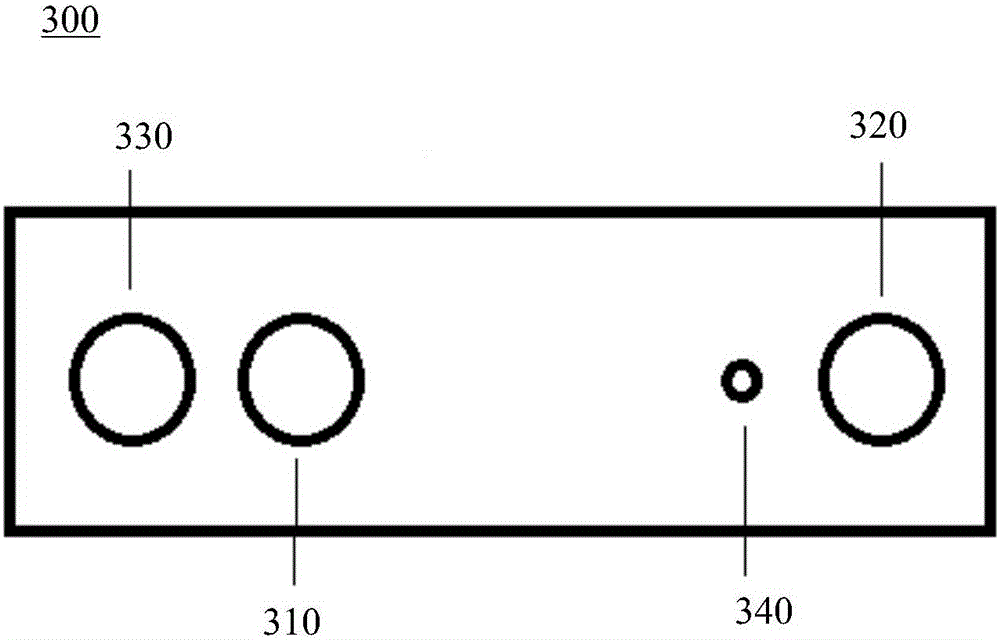
[0021] image 3 A device 300 for acquiring a depth map of a three-dimensional scene is shown, including an infrared projector 310 , a first camera 320 , a second camera 330 , and an infrared supplementary light source 340 . The first camera 320 is configured to receive infrared light, for example, the first camera 320 is an infrared camera. The second camera 330 is configured to receive colored visible light, for example, the second camera 330 is a color camera and can collect color images. Different from the known devices, the first camera 320 and the second camera 330 are not close to each other, but are arranged at a relatively long distance on the device 300, and this distance conforms to binocular vision. The infrared projec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More