

SCARA robot calibration method
A calibration method and robot technology, applied in instruments, measuring devices, optical devices, etc., can solve the problems of difficulty in guaranteeing zero-position calibration results, and achieve the effect of accurate absolute accuracy and easy zero-position calibration results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
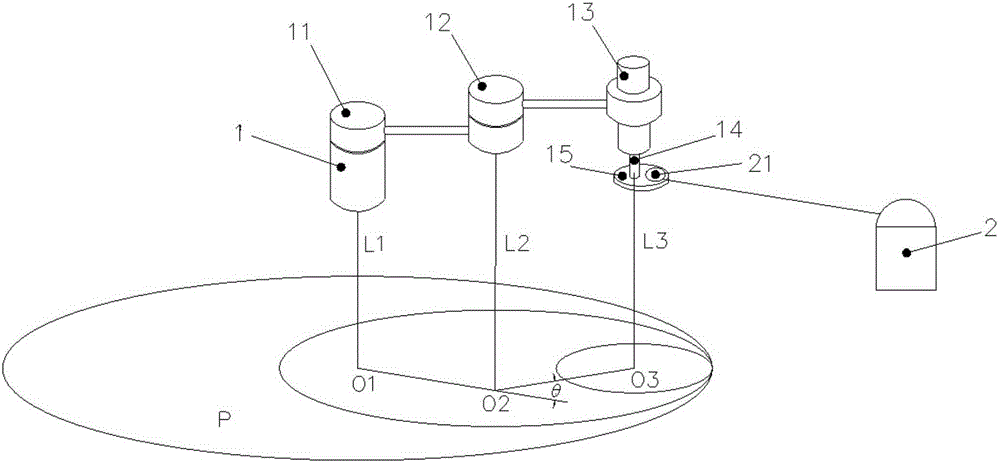
[0017] Such as figure 1 As shown, the SCARA robot 1 includes a first joint 11, a second joint 12, a third joint 13, a moving joint 14 and an end flange 15, the first joint 11 is connected to the second joint 12 through a connecting piece, and the second joint 12 The third joint 13 is connected by a connecting piece, the third joint 13 is axially installed with a movable joint 14 , and the end of the movable joint 14 is installed with an end flange 15 .
[0018] The calibration method of the SCARA robot is implemented by a laser reflection device 21 and a laser three-coordinate measuring device 2, and the laser three-coordinate measuring device 2 is a laser tracker or any other device with the same function.
[0019] Step 1, install the laser reflection device 21 on the flange 15 at the end of the SCARA robot to make the first joint 11 of the SCAR...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More