

Carrying robot at seven degrees of freedom with symmetrically arranged driven arms
A technology for handling robots and symmetrical arrangement, applied in the field of robotics, can solve the problems of small application range, inflexible movement of the movable platform, and limited application range, etc., and achieve the effects of fast speed, high rigidity, and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
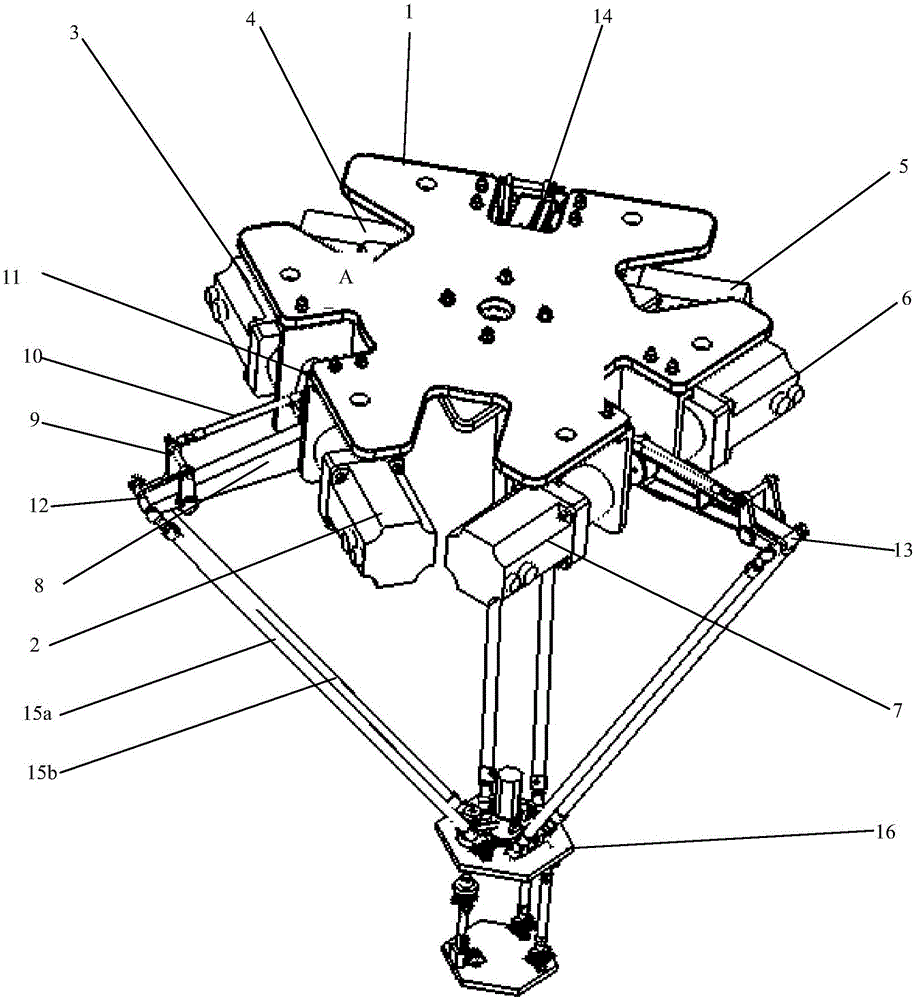
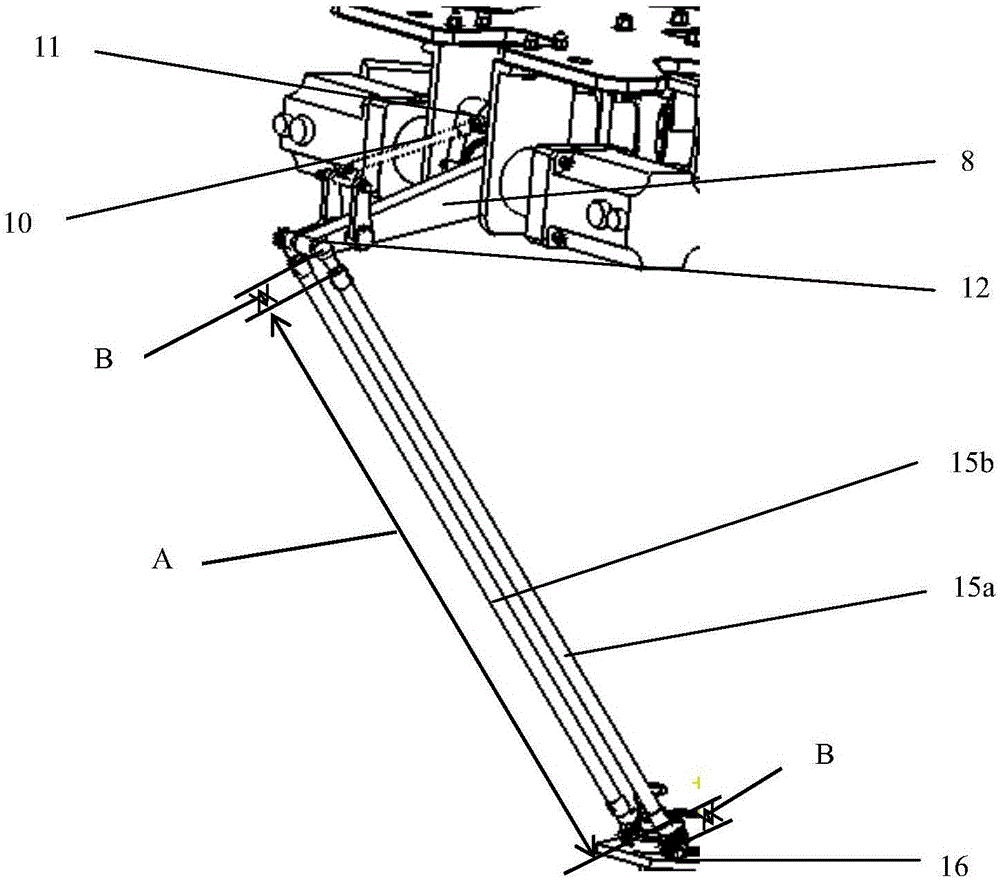
[0022] like figure 1 , figure 2 , image 3 , Figure 4 As shown, a seven-degree-of-freedom handling robot with symmetrically arranged slave arms includes a frame 1, a moving platform mechanism, a driving device and three branch chains. The driving device is composed of a motor and a speed reducer. The moving branch chains include a first branch chain 12, a second branch chain 13 and a third branch chain 14, and the three branch chains are evenly distributed on the frame 1, and the distance between each branch chain is 120°. The moving platform 16 forms a parallel closed-loop structure with the frame 1 through the first branch chain 12, the second branch chain 13 and the third branch chain 14, and the moving platform 16 is connected by the first branch chain 12, the second branch chain 13 and the third branch 14 driven. The structure of the second branch chain and the third branch chain 14 is the same as that of the first branch chain 12
[0023] like figure 1 , figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More