

Servo-motor-drive multi-degree-of-freedom connecting rod mechanism painting operation mechanical arm
A technology of servo drive device and servo motor, applied in the direction of manipulator, program control manipulator, injection device, etc., can solve the problems of low transmission efficiency, poor reliability, complex structure, etc., and achieve good dynamic performance, large bearing capacity and low inertia. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
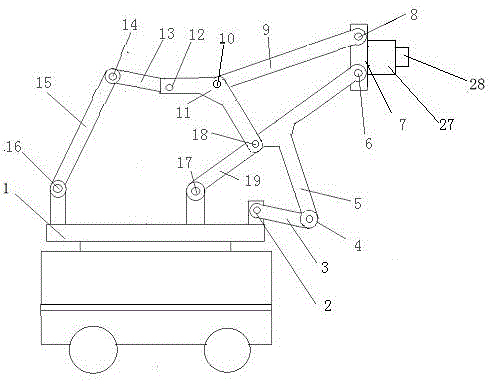
[0006] A coating operation mechanical arm driven by a servo motor with a multi-degree-of-freedom linkage mechanism, including a base 1, a boom lifting mechanism, a wrist link pitching mechanism, a wrist 27, a nozzle 28, and a servo drive device; the base 1 is installed on a Move on the slewing platform; the boom lifting mechanism is composed of the second active rod 19, the third connecting rod 3, and the boom 5. One end of the second active rod 19 is connected to the base 1 through the second rotating pair 17, and the other end The third connecting rod 3 is connected to the boom 5 through the third turning pair 18, one end of the third connecting rod 3 is connected to the base 1 through the tenth turning pair 2, the other end is connected to the boom 5 through the first turning pair 4, and the boom 5 is connected to the boom 5 through the tenth turning pair 2. The four rotating pairs 6 are connected with the wrist link 7; the pitching mechanism of the wrist link is made up of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More