

A test method for early troubleshooting of handling industrial robots
An industrial robot, early failure technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of long time and high economic cost of early troubleshooting of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0200] The present invention is described in detail below in conjunction with accompanying drawing:
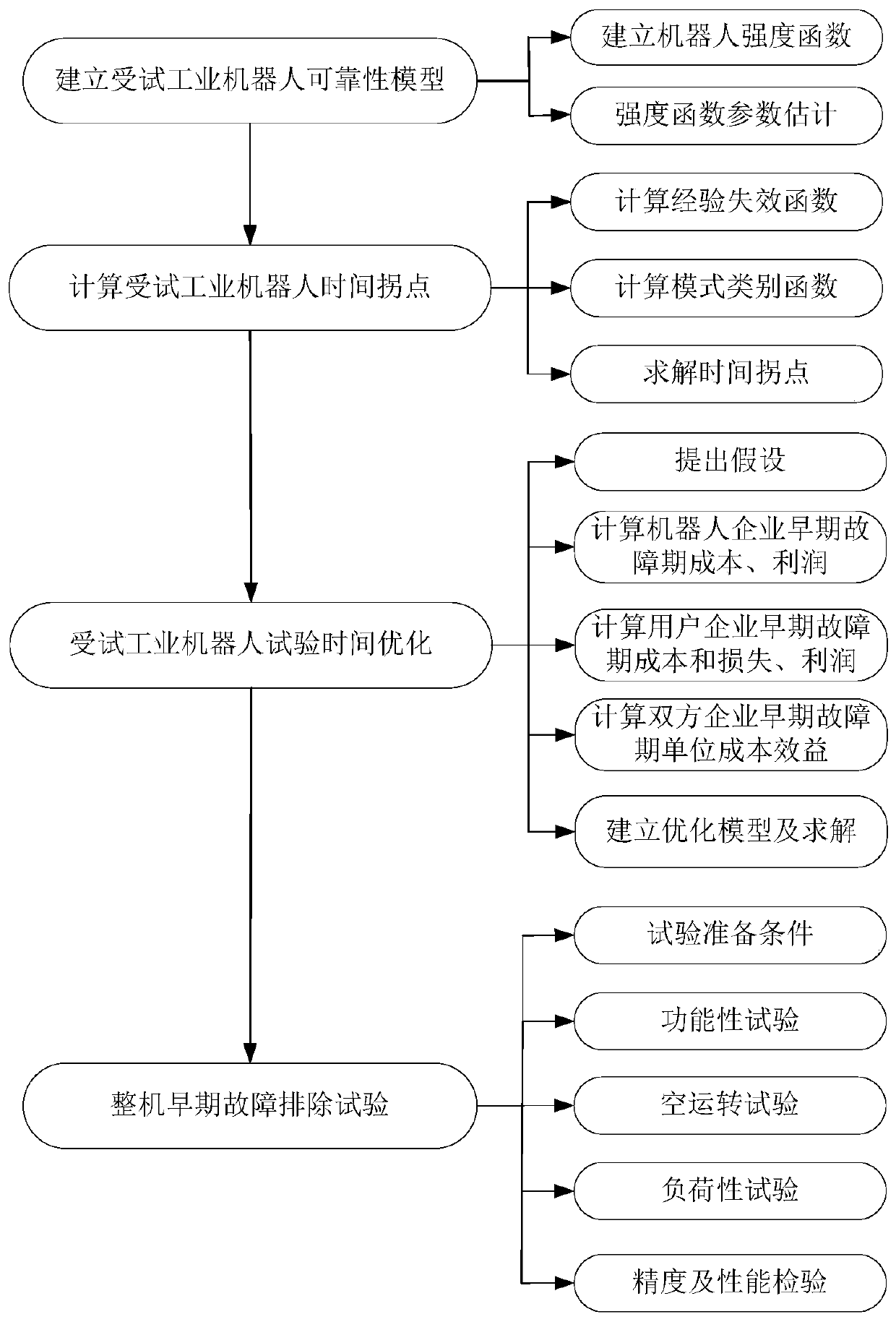
[0201] refer to figure 1 , a kind of handling class industrial robot early-stage troubleshooting test method of the present invention includes establishing the reliability model of the tested robot, calculating the time inflection point of the tested robot from the early failure period to the occasional failure period, and obtaining the time inflection point Based on the optimization of the test time of the tested robot and the early troubleshooting test of the whole machine of the tested robot. Among them, the test time of the tested robot is optimized with the maximum unit profit as the optimization goal. A test robot is a robot that is about to undergo an early troubleshooting trial.
[0202] The steps of an early troubleshooting test method for a handling industrial robot described in the present invention are as follows:
[0203] 1. Establish the reliability model of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More