

A Calibration Method for 3D Topography Measurement System Based on Telecentric Imaging
A measurement system and three-dimensional topography technology, which can be applied to measurement devices, three-dimensional systems, image analysis, etc., can solve the problems of complex calibration of three-dimensional topography measurement systems, difficult to accurately calibrate some parameters, and affecting the accuracy of three-dimensional topography measurement systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
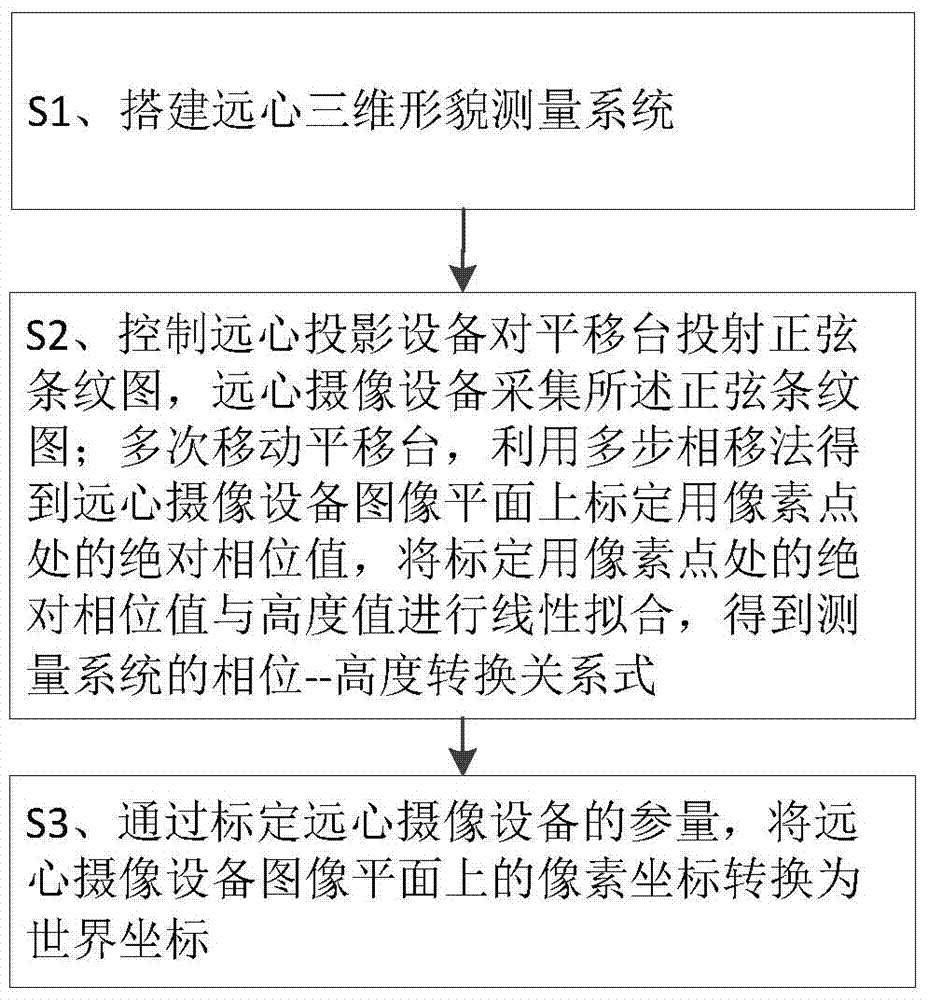
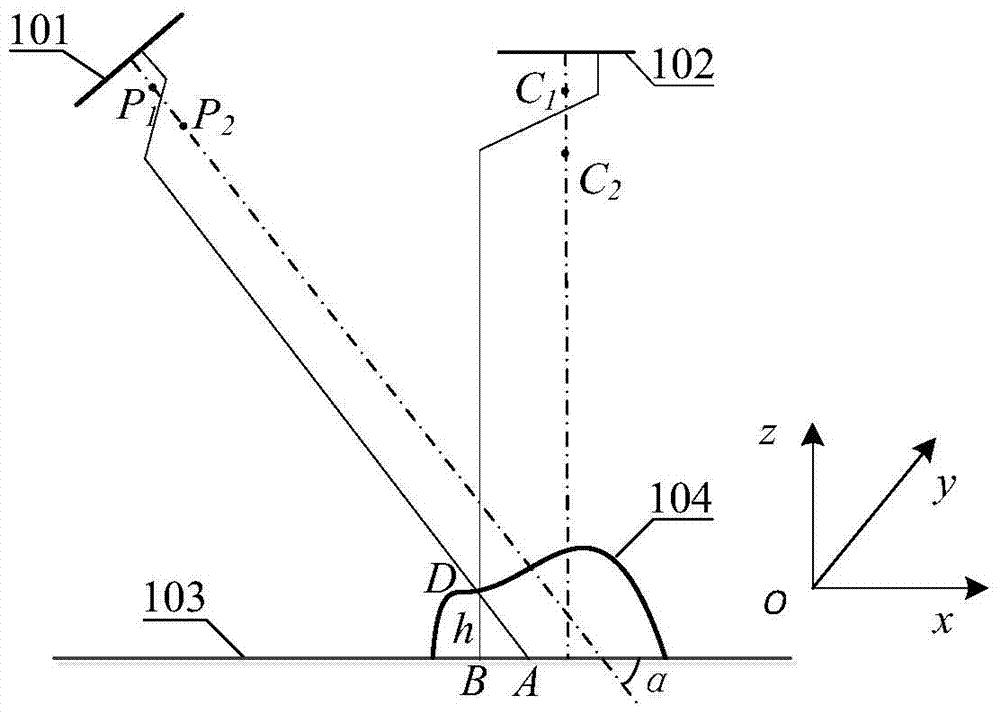
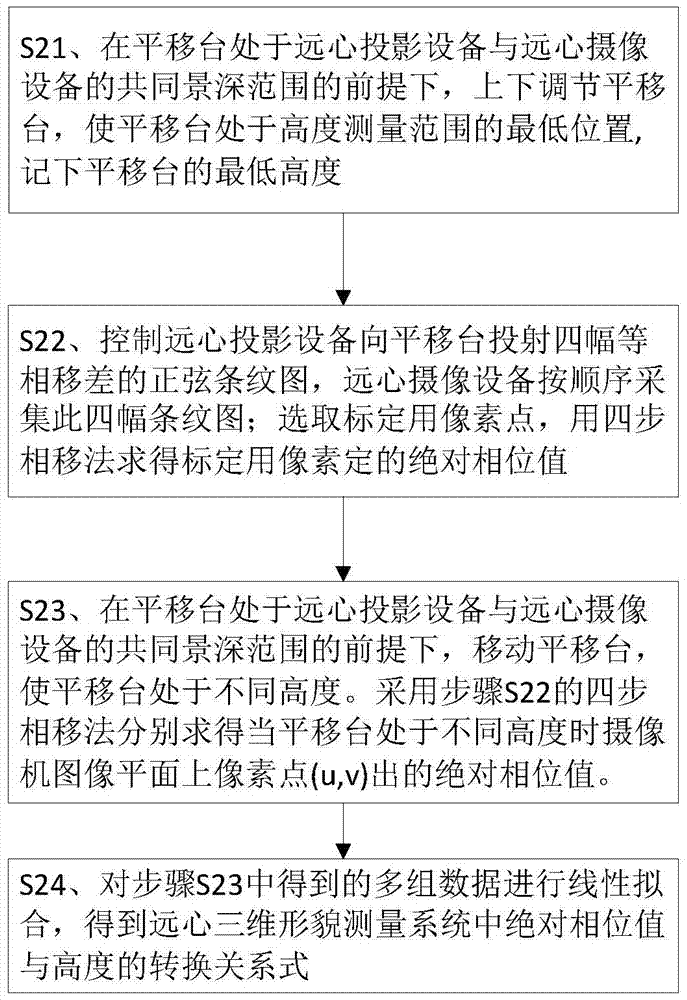
[0061] A calibration method for a three-dimensional shape measurement system of the present invention builds a three-dimensional shape measurement system for telecentric imaging, so that when the translation platform moves within the depth of field of the telecentric projection equipment, the telecentric projection equipment projects onto the translation platform The above is a sinusoidal fringe pattern with a constant period. Within the depth of field of the telecentric camera device, the linear relationship between the absolute phase value of any pixel on the image plane of the camera device and the height of the translation platform can be established to determine the three-dimensional shape. The phase-height mapp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More