Semi-physical simulation system for portable integrated multiple controlled objects
A semi-physical simulation, controlled object technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of automatic control theory demonstration, lack of professional simulation teaching devices, etc., and achieve the effect of light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
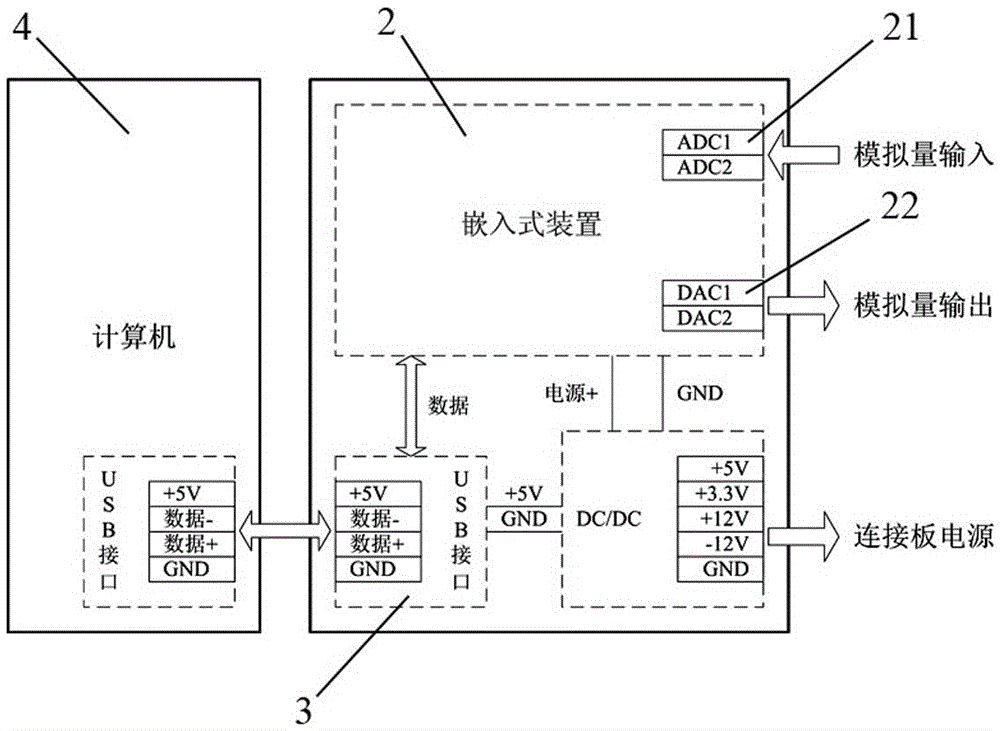
[0027] Such as figure 1 , figure 2 As shown, the portable hardware-in-the-loop simulation system integrating multiple controlled objects of the present invention includes a circuit connection board 1, an embedded device 2 and a USB interface 3.
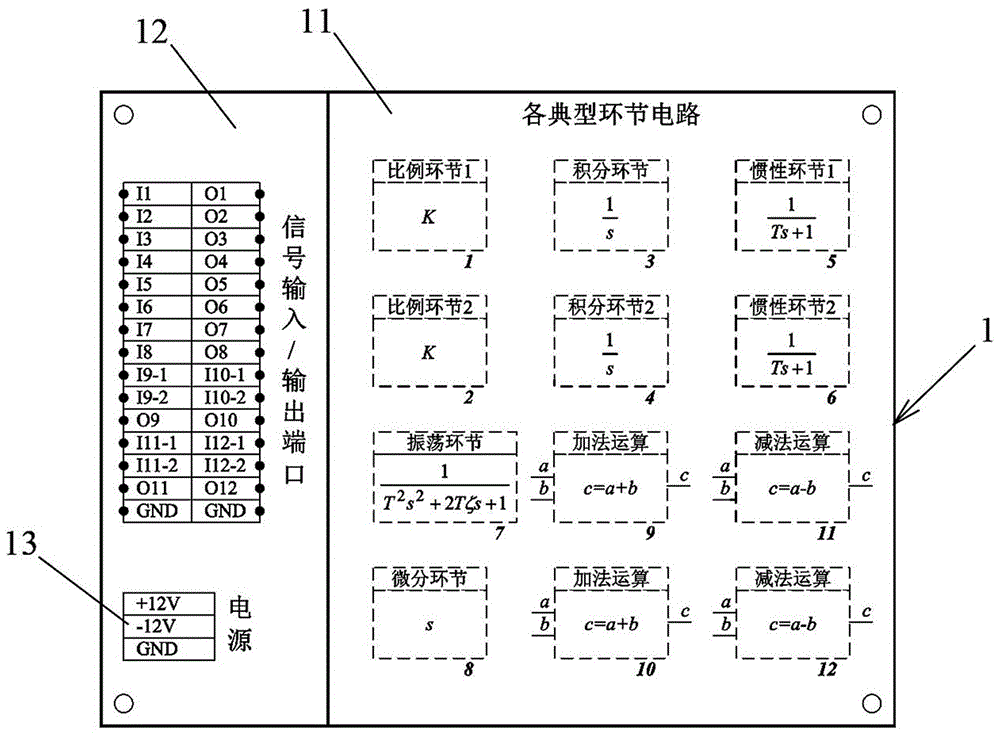
[0028] The circuit connection board 1 is provided with a simulation circuit for each basic link of the controlled object commonly used in the automatic control system and a power connection circuit for providing a DC power supply, and the simulation circuit corresponding to each basic link is set on the board. The basic link identification area 11, the signal input / output port identification area 12 of the input / output connection terminals of the integrated simulation analog circuit of each basic link, and the power identification area 13 of the integrated power connection terminal. The basic links of controlled objects commonly used in automatic control systems include proportional links, integral links, differential links, oscillation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More