

Minimally invasive surgery robot 7-degree freedom operation master manipulator
A minimally invasive surgery, robotics technology, applied in the field of medical robots, can solve problems such as poor flexibility and versatility, complex structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be further described below in conjunction with the drawings and specific implementations.
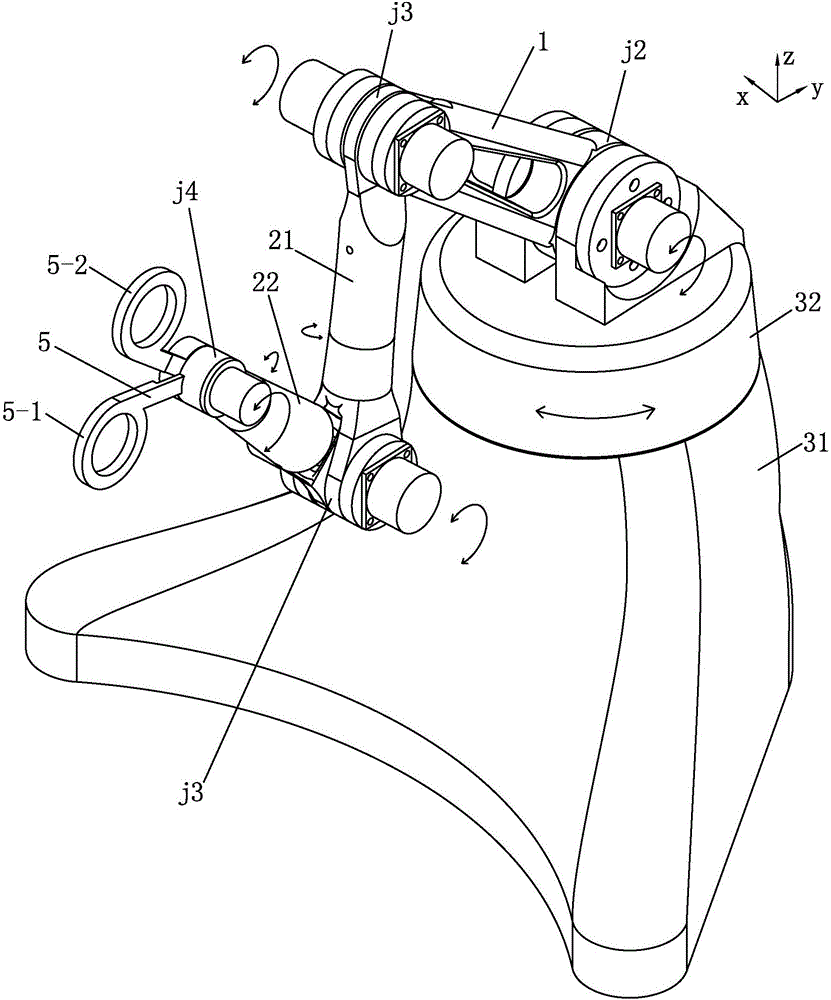
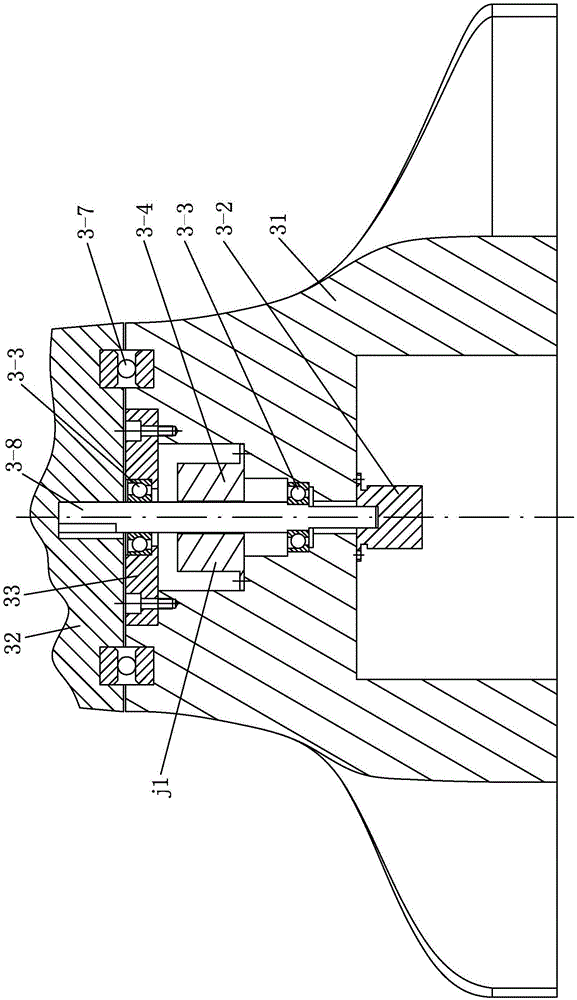
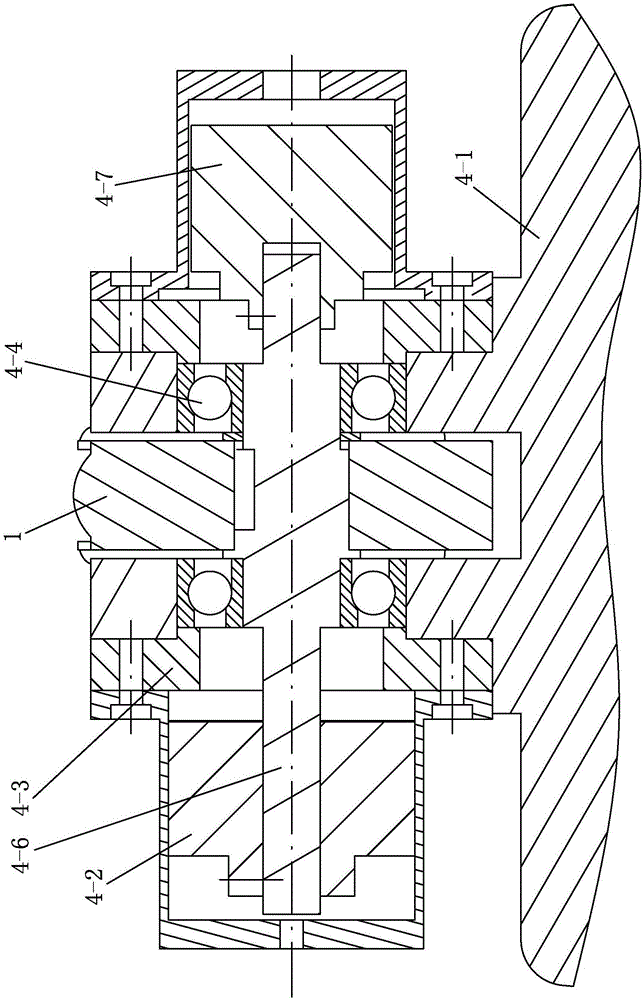
[0024] Combine Figure 1-Figure 10 It is explained that the seven-degree-of-freedom operation master hand of a minimally invasive surgical robot of this embodiment includes a base 31, a turntable 32 that is arranged on the base 31 and rotates around the z-axis, and is connected to the turntable 32. The connecting rod that rotates around the x-axis 1, the first rotation link 21 connected to the connecting rod 1 that can rotate around the x-axis, and the second rotation link connected to the first rotation link 21 that can rotate around the x-axis The connecting rod 22 and the clamping mechanism 5 connected with the second rotation connecting rod 22;
[0025] The clamping mechanism 5 includes a thumb part 5-1 and an index finger part 5-2 that rotate relatively.
[0026] In this embodiment, the angular displacement sensor provided in e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More