

A hand movement tracking system and tracking method
A tracking system and hand movement technology, applied in the field of inertial navigation, can solve problems such as poor dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0109] The present invention will be further explained below in conjunction with the drawings.
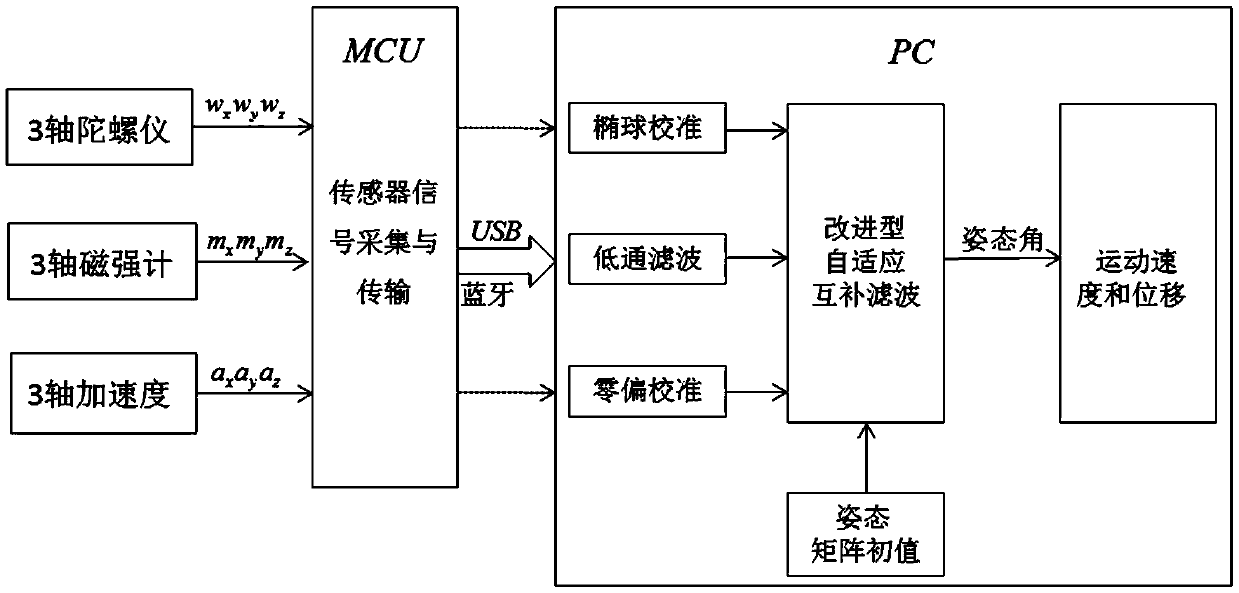
[0110] Such as figure 1 As shown, the technical implementation of the motion tracking method in the present invention specifically includes the following steps:
[0111] (1) The accelerometer measures the triaxial acceleration of the hand, the gyroscope measures the triaxial angular velocity of the hand, and the magnetic sensor measures the triaxial magnetic field component of the hand;
[0112] (2) MCU receives the three-axis acceleration measured by the accelerometer, the three-axis angular velocity measured by the gyroscope and the three-axis magnetic field component measured by the magnetic sensor through the IIC bus, and sends it to the host computer;
[0113] (3) The host computer first establishes an error model for the three-axis magnetic field components through the least square method to eliminate the magnetic field interference in the environment; secondly, the three-axis accele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More