Window cleaning robot and obstacle crossing mode control method thereof
A glass-wiping robot and control method technology, applied in the field of wall-climbing robots, can solve problems such as slow moving speed, failure to overcome obstacles, and large volume, and achieve the effect of increasing the anti-torsion ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The control method of the obstacle-crossing mode of the glass-wiping robot of the present invention will be further described below in conjunction with the accompanying drawings and specific implementation.
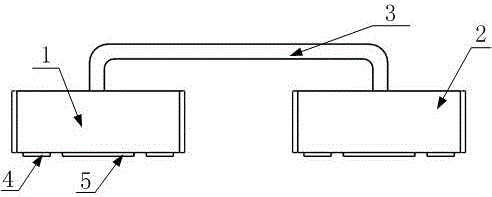
[0031] Such as figure 1 As shown, the glass-wiping robot includes a glass-wiping robot one 1, a glass-wiping robot two 2 and an intermediate link 3, wherein each glass-wiping robot includes a mobile device 4 and an adsorption device 5 suction cups, each glass-wiping robot Both have the function of moving and absorbing; through the intermediate connecting rod 3, the sub-glass-wiping robot 1 and the sub-glass-wiping robot 2 are connected to each other.
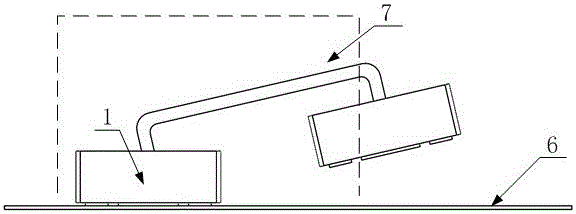
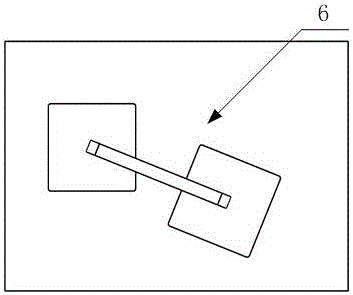
[0032] Such as figure 2 , image 3 As shown, there is a definite transmission relationship between the intermediate link 3 and the sub-robot 1 and the sub-robot 2. By controlling the intermediate link 3, the sub-robot 1 and the sub-robot 2 can be parallel to the glass respectively. The surface 6 and the plane per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com