

Symmetric type variable stiffness flexible actuator based on variable supporting point
A flexible drive, symmetrical technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of complex variable rigidity drive mechanism, complex rigidity adjustment process, and small rigidity adjustment range, and achieve the output position and output rigidity. Real-time synchronization, uniform force, compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
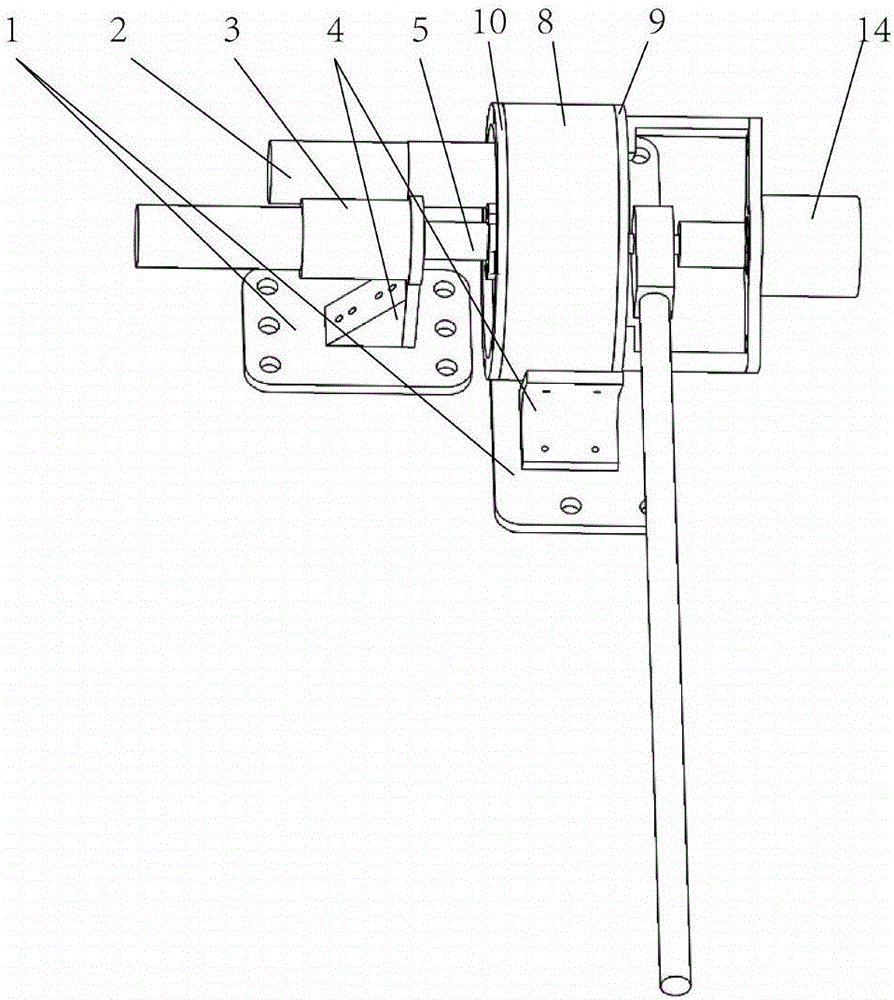
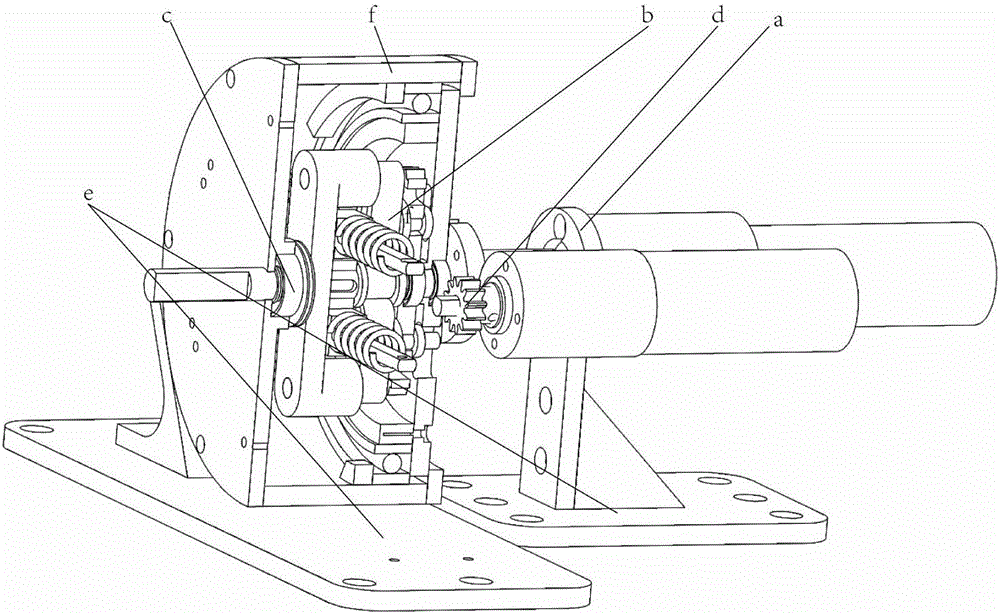
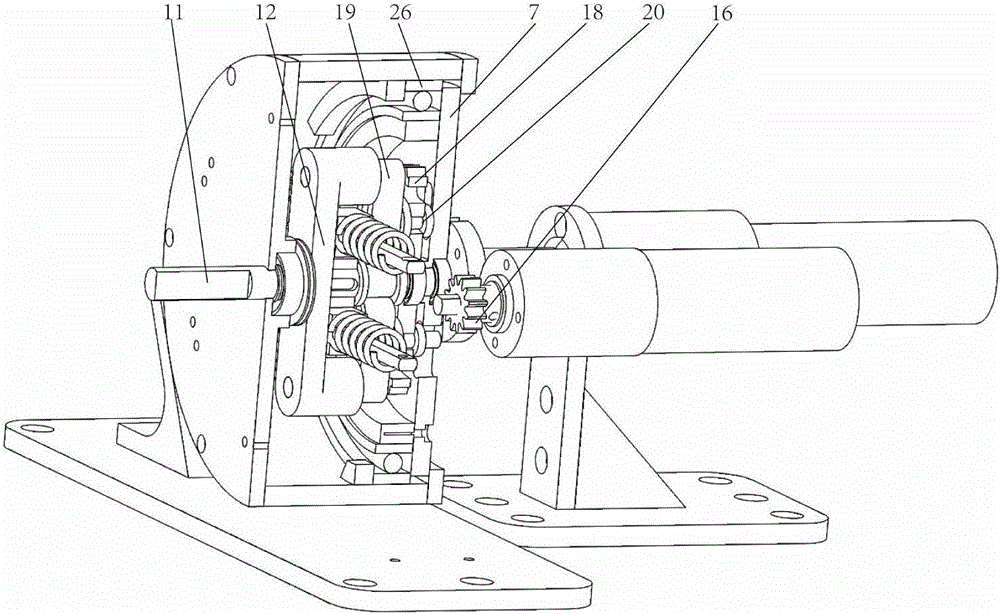
[0028] The symmetrical variable stiffness flexible actuator based on the variable fulcrum shown in the figure includes a power input mechanism a, a stiffness adjustment mechanism b, and a power output mechanism c. There are two sets of stiffness adjustment structures b, which are symmetrical along the center of the power output mechanism c Arrangement, the stiffness adjustment mechanism b includes a lever 19, a fulcrum column 20, a slider 17 and a linear guide rail 28, one end of the lever 19 is hinged on the power output mechanism c, and the upper and lower sides of the lever 19 are respectively provided with a top chute 19.1 and a bottom chute 19.2 , one end of the fulcrum column 20 is matched with the top chute 19.1, the other end is connected to the power input mechanism a, and a fulcrum adjustment structure d is arranged between the pow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More