

Space six degrees of freedom follow-up joint manipulator based on horizontal adaptive adjustment
A horizontal self-adaptive, manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems affecting the transfer process, complex assembly environment, complex structure, etc., to achieve simple structure, ensure stability and reliability. , the effect of simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations. The basic principles of the present invention defined in the following description can be applied to other embodiments, variations, improvements, equivalents and other technical solutions without departing from the spirit and scope of the present invention.
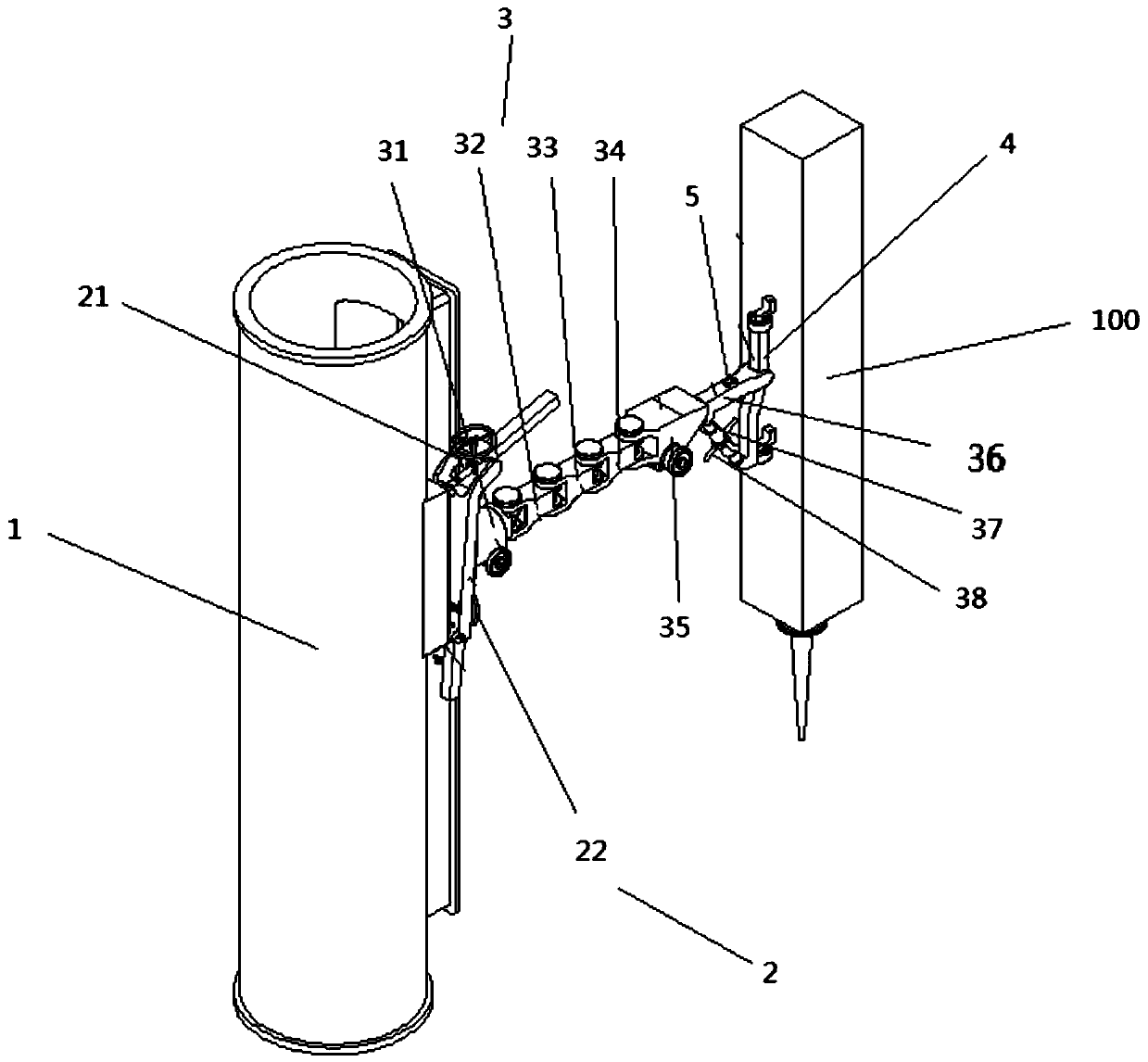
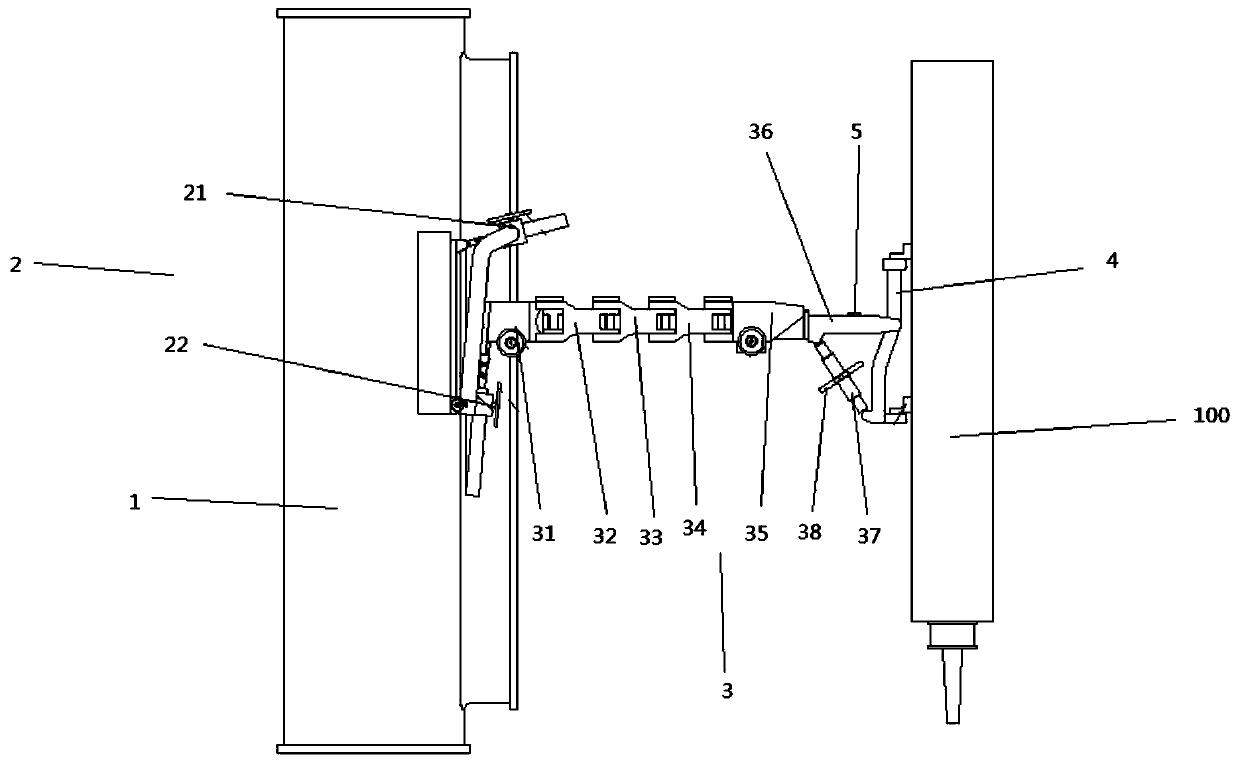
[0015] like Figure 1 to Figure 3 As shown, according to the inventive spirit of the present invention, a space six-degree-of-freedom follow-up joint manipulator based on horizontal self-adaptive adjustment is provided. reliability. Specifically, the space six-degree-of-freedom follow-up joint manipulator based on horizontal adaptive adjustment includes a connecting base mechanism 1, a driving mechanism 2, a link mechanism 3 and a manipulator 4, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More