Hoisted type industrial mechanical arm
A technology for industrial machinery and manipulators, applied in the field of hoisting industrial manipulators, can solve problems such as inability to balance gravity, and achieve the effects of facilitating smooth movement, reducing driving resistance, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
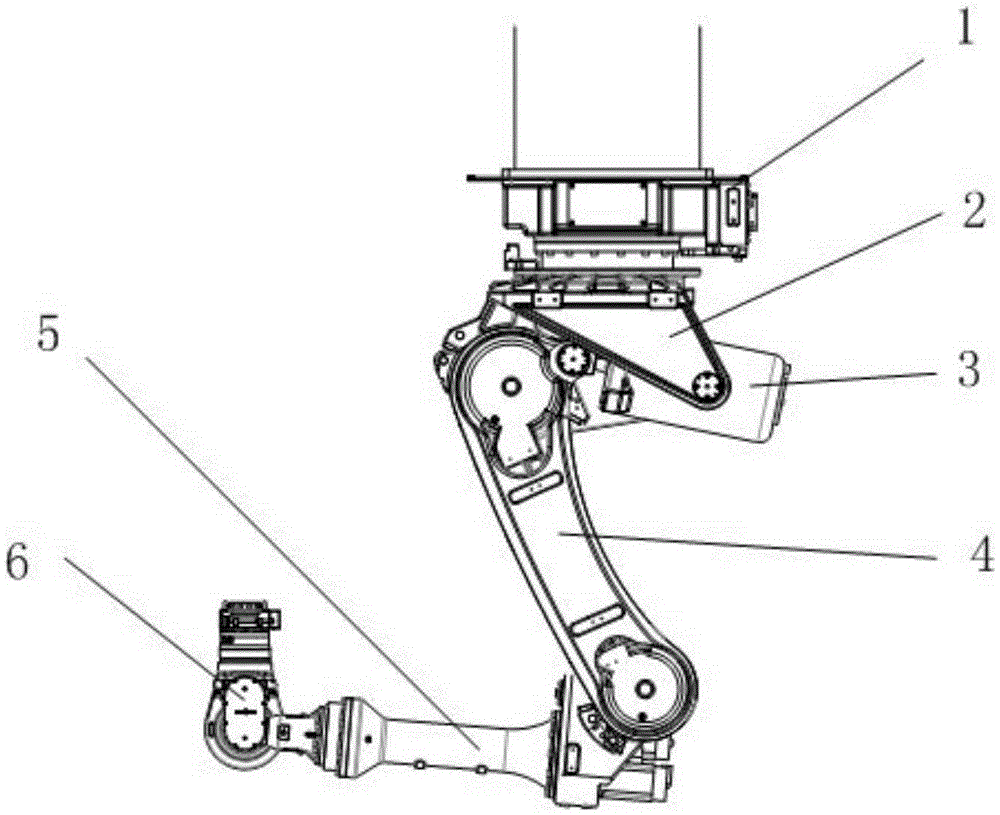
[0032] see figure 1 As shown, Embodiment 1 of the present invention provides a suspended industrial robot arm, including a ceiling base 1 , a rotating base joint 2 , a balance cylinder 3 , a first robot arm 4 , a second robot arm 5 and an end joint group 6 .
[0033] Wherein, one end of the ceiling base 1 is fixed on the wall or the base, and the rotating base joint 2 is connected with the other end of the ceiling base 1, and can perform rotational movement; the first mechanical arm 4 and the rotating base The joint 2 is connected, and the fulcrum of the balance cylinder 3 is fixed on the rotation base joint 2 .
[0034] The force output end of the industrial mechanical arm is connected with one end of the first mechanical arm 4, the other end of the first mechanical arm 4 is connected with the second mechanical arm 5, and the end of the second mechanical arm 5 is connected with the The end joint groups 6 are connected.
Embodiment 2
[0036] see figure 1 As shown, compared with Embodiment 1, Embodiment 2 of the present invention provides a hanging industrial robot arm, and the first robot arm 4 is a crank.
[0037] Specifically, a suspended industrial mechanical arm includes a ceiling base 1 , a rotating base joint 2 , a balance cylinder 3 , a first mechanical arm 4 , a second mechanical arm 5 and an end joint group 6 .
[0038] One end of the ceiling base 1 is fixed on a wall or a base, and the rotating base joint 2 is connected with the other end of the ceiling base 1 for rotational movement; the first mechanical arm 4 and the rotating base joint 2 The fulcrum of the balancing cylinder 3 is fixed on the rotating base joint 2 .
[0039] The force output end of the industrial mechanical arm is connected with one end of the first mechanical arm 4, the other end of the first mechanical arm 4 is connected with the second mechanical arm 5, and the end of the second mechanical arm 5 is connected with the The e...
Embodiment 3
[0044] see figure 1 As shown, compared with Embodiment 1, Embodiment 3 of the present invention provides a suspended industrial mechanical arm, and the connection line between the first connection point and the first fulcrum is related to the center of gravity and the center of gravity of the first mechanical arm 4 The line connecting the first fulcrums is vertical.
[0045] Specifically, a suspended industrial mechanical arm includes a ceiling base 1 , a rotating base joint 2 , a balance cylinder 3 , a first mechanical arm 4 , a second mechanical arm 5 and an end joint group 6 .
[0046] One end of the ceiling base 1 is fixed on a wall or a base, and the rotating base joint 2 is connected with the other end of the ceiling base 1 for rotational movement; the first mechanical arm 4 and the rotating base joint 2 The fulcrum of the balancing cylinder 3 is fixed on the rotating base joint 2 .
[0047] The force output end of the industrial mechanical arm is connected with one en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More