

A control method for a fold-down aerial work vehicle capable of preventing self-damage of the vehicle body
The technology of a high-altitude operation vehicle and a control method, which is applied in the field of aerial operation vehicles, can solve problems such as low work efficiency, large fixed-point quantity, and difficulty, and achieve the effects of improving work efficiency, high degree of automation, and preventing misoperation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
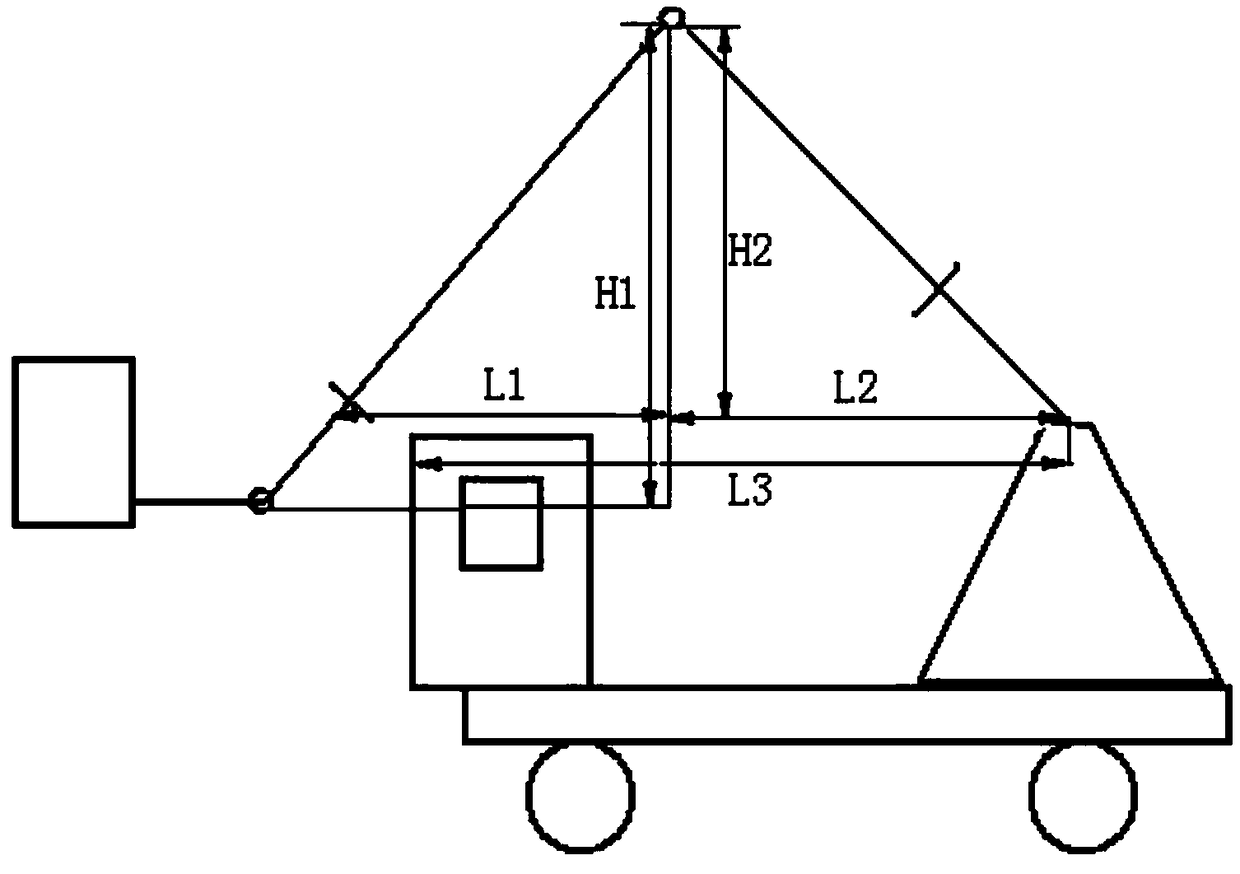
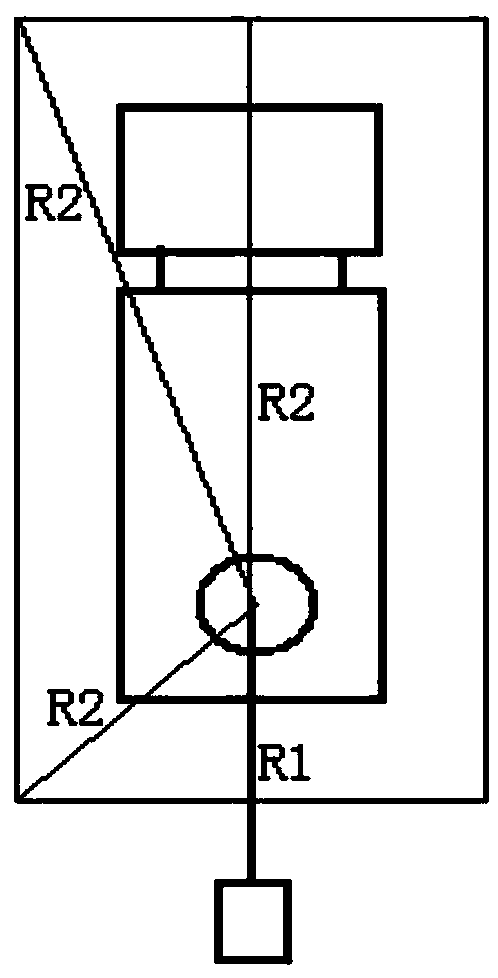
[0030] The present invention sets its own safety range for the down-folding aerial work vehicle, such as Figure 4 As shown, the position of the boom assembly 1 is calculated by collecting the attitude information of the down-folding aerial work vehicle through the controller 4, and by comparing the relationship between the position of the boom assembly 1 and its own safety range, the movement of certain booms is limited or allowed. motion trajectory, so as to achieve the purpose of preventing the boom assembly 1 from colliding with the vehicle body.
[0031] The present invention will be further described below in conjunction with the accompanying drawings.
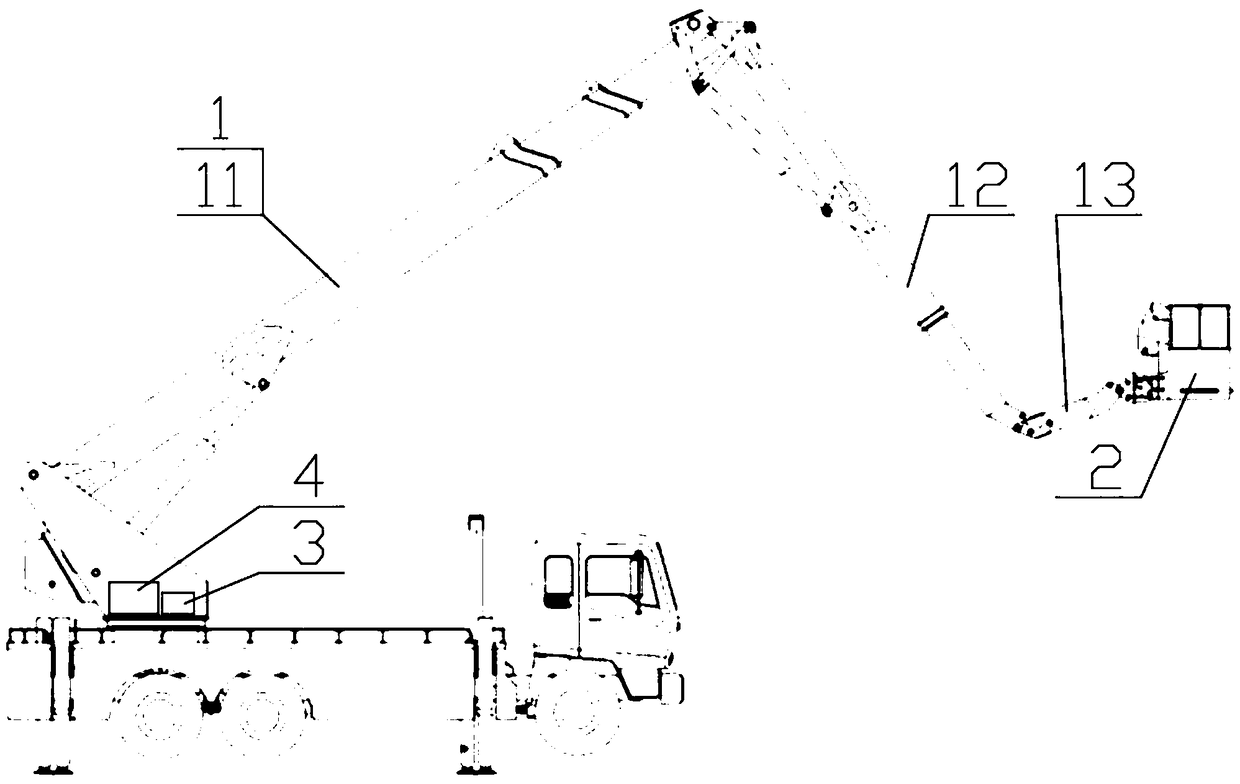
[0032] Such as figure 1 As shown, the down-folding aerial work vehicle used in the control method of the self-damage prevention of the vehicle body includes a car body assembly, a jib assembly 1, a working platform 2, and an action control hydraulic valve group 3 , Controller 4, jib inclination sensor, jib length senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More