

Robot joint pose monitoring method and device
A technology of robot joints and robots, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as robot movement deviation, and achieve the effect of avoiding losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
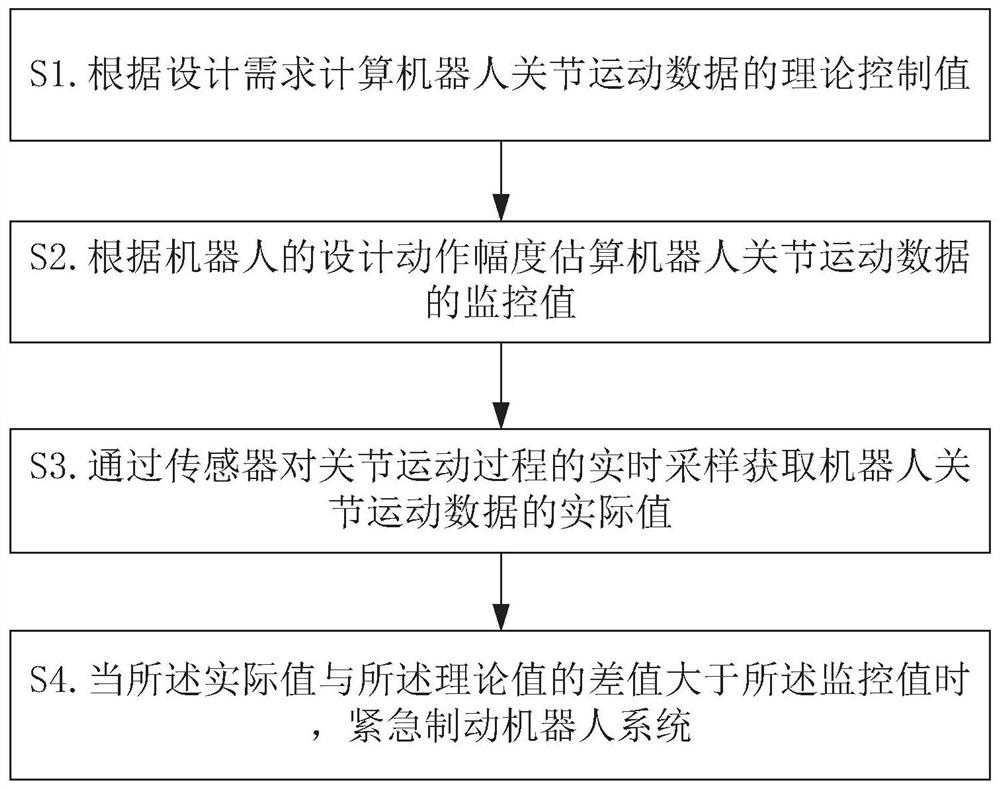
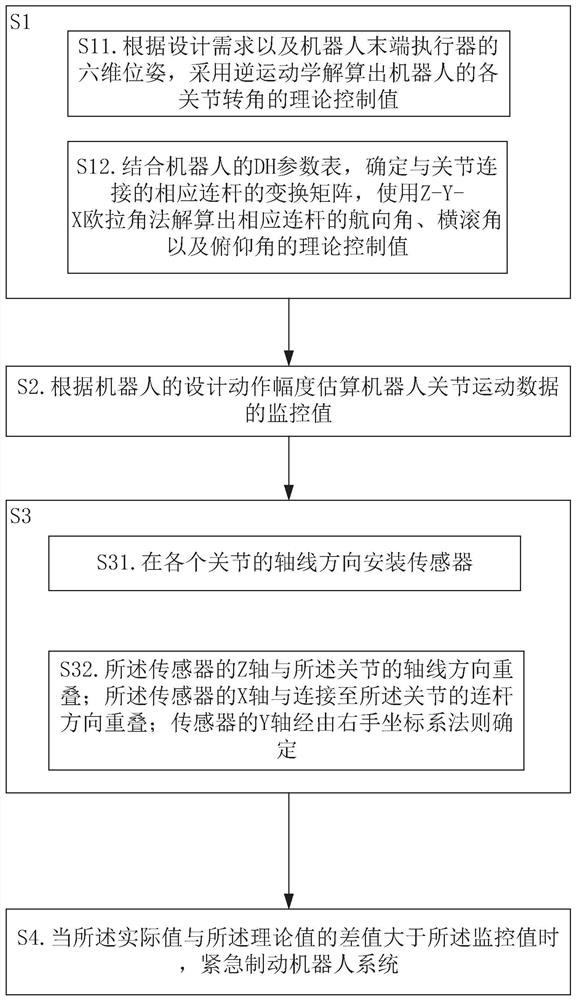
[0023] Figure 1-2 The implementation process of the robot joint posture monitoring method provided by the first embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0024] A method for monitoring robot joint pose, the method comprising the following steps:
[0025] S1. Calculate the theoretical control value of the robot joint motion data according to the design requirements;
[0026] S2. Estimate the monitoring value of the joint motion data of the robot according to the designed motion range of the robot;
[0027] S3. Obtain the actual value of the joint motion data of the robot through real-time sampling of the joint motion process by the sensor;
[0028] S4. When the difference between the actual value and the theoretical value is greater than the monitoring value, brake the robot system urgently.
[0029] Preferably, the robot joi...
Embodiment 2
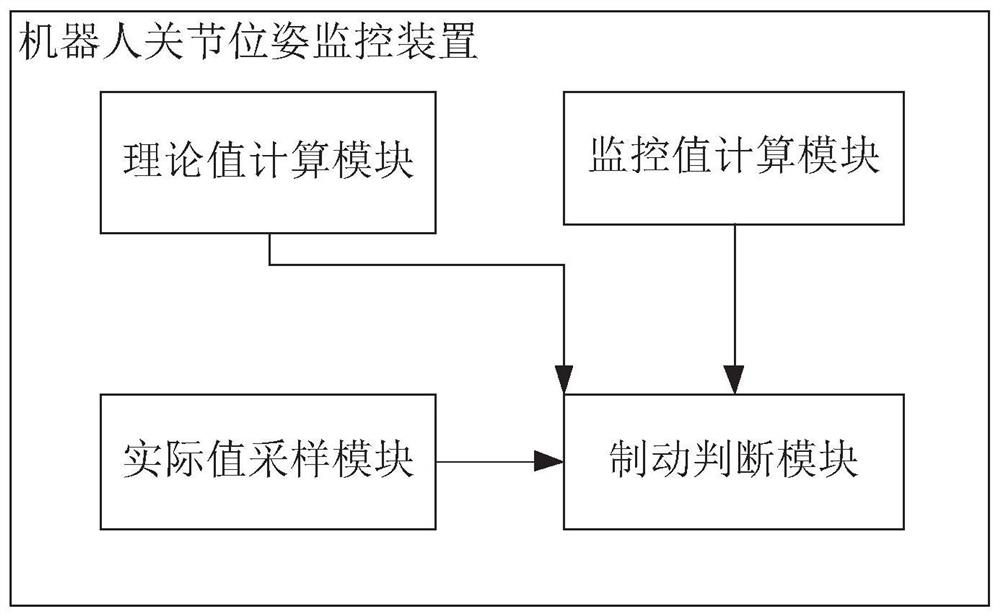
[0040] image 3 The structure of the robot joint posture monitoring device provided by the third embodiment of the present invention is shown. For convenience of description, only the parts related to the embodiment of the present invention are shown.
[0041] A robot joint posture monitoring device, the device includes:
[0042] The theoretical value calculation module calculates the theoretical control value of the robot joint motion data according to the design requirements;
[0043] The monitoring value calculation module estimates the monitoring value of the joint motion data of the robot according to the designed motion range of the robot;
[0044] The actual value sampling module obtains the actual value of the joint motion data of the robot through real-time sampling of the joint motion process by the sensor;
[0045] The braking judgment module is electrically connected to the theoretical value calculation module, the monitoring value calculation module and the actu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More