

Semi-autonomous imitation terrain flight system of unmanned aerial vehicle and control method of semi-autonomous imitation terrain flight system
A control method and flight controller technology, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, can solve the problems of unstable altitude control, air pressure changes, inability to perceive surface altitude changes, etc. The effect of convenient practical operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
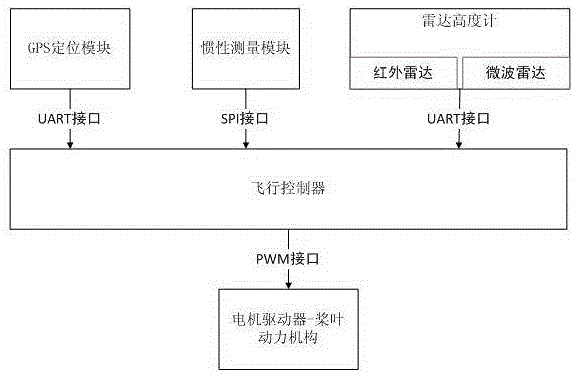
[0025] A semi-autonomous ground imitation flight system for unmanned aerial vehicles, such as figure 1 As shown, it includes GPS positioning module, inertial measurement module, barometer module, radar altimeter, motor driver, propeller power structure and flight controller,
[0026] The GPS positioning module is connected to the flight controller through the UART interface, the inertial measurement module is connected to the flight controller through the SPI interface, the radar altimeter is connected to the flight controller through the UART interface, and the motor driver is connected to the flight controller through the PWM interface. The output shaft is connected to the power structure of the propeller, and the flight controller obtains the data of the GPS positioning module, the inertial measurement module and the radar altimeter to calculate the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More